魏二虎1 程晓晖1. 2 安志国3
(1 武汉大学测绘学院,武汉市珞喻路129 号.430079)
(2 广州市城市规划勘测设计研究院,广州市建设大马路10 号.510060)
(3 68011 部队,芝州市.730020)
摘要:总结了大地测量和天体测量对SVLBI 卫星的要求条件,分析了GNSS 系统和SLR 系统以及中继卫星对卫星的定轨精度、地面测控站对SVLBI 卫星的跟踪效率,研究了SVLBI 卫星对射电源的访问效率,及其与地面VLBI 测站和VSOP2 卫星形成的地-空和空+空基线观测射电源的分辨率等,以此为基础设计我国SVLBI卫星的轨道参数。
关键词:大地测量;SVLBI; 中继卫星;卫星定轨
中图法分类号:P228.41
空间甚长基线干涉测量技术(SVLBl)是地面VLBI 测量在空间的延伸, SVLBI 任务在天体测量、大地测量、地球动力学的潜力很大程度上依赖卫星轨道的精确确定。因此,有利于高精度确定卫星轨道的定轨研究和轨道设计对SVLBI 任务至关重要。目前,专门设计适合大地测量学和地球动力学研究的SVLBI 卫星的研究开展得比较少,文献[1J 初步设想井设计了我国SVLBI 卫星的轨道和测控网,本文在此基础上重点研究了在SVLBI 卫星的精密定轨技术、测控站的测控效率以及SVLBI 卫星与地面VLBI 测站的联合观测时间效率及对射电源的访问效率等约束条件下设计测地型SVLBI 卫星轨道参数。
1 SVLBI 卫星的精密定轨技术研究
1. 1 GNSS 系统用于卫星精密定轨
GPS 技术自从问世以来,己对传统测量和导航进行了一场革命,特别是1997 年Zumbeger 提出的精密单点定位技术大大提高了卫星轨道测量中的GPS 定位精度山,吨。由于GPS 卫星属于中轨卫星,当SVLBI 卫星轨道较高时,其接受GPS 卫星的信号将比较微弱,影响其定轨精度,因此引入伽利略系统。文献[1]分别对GPS 系统和Galileo 系统在空间VLBI 卫星的覆盖情况进行了研究, 2006 年,韩国IAINjGNSS 大会上有学者提出将GPS 系统与Galileo 系统结合用于精密定轨,因此可将GNSS系统用于我国SVLBI 卫星的定轨。
1. 2 利用VLBI 技术和SLR 技术对卫星定轨
如果在SVLBI 卫星上安装了激光反射器,将为VLBI 技术和激光测卫技术(SLR) 结合成为一个统一的观测系统提供了可能(VLBI-SLR 卫星) ,解决了它们各自作为一种独立的测量技术所存在的局限,从而能够实现目前得以实现的科学目标刊。目前, VLBI 的延迟观测精度已达到1 ~3cm , SLR 的测距精度为2~5 cm ,这些精度还会进一步提高,利用这些观测量测定SVLBI-SLR卫星位置的精度预计可达到1 ~3 cm[4] 。
1. 3 利用申继卫星多普勒定轨
眼踪与数据中继卫星系统(tracking and dadarelay satellite system , TDRSS) 是20 世纪航天测控通信技术的重大突破。其"天基"设计思想从根本上解决了测控、通信的高覆盖率问题,同时还解决了高速数传和多目标测控通信等技术难题,并且利用中继卫星对主卫星进行定轨也取得了很大成效,如日本的SELENE 月球探测计划就采用了中继卫星对主卫星通过四程多普勒跟踪方式进行定轨归。我国于2008 年4 月25 日23 时35 分在西昌卫星发射中心成功发射第一颗中继卫星"天链一号",经过4 次机动变轨控制"天链一号"准确进入了东经77。赤道上空的地球同步转移轨道,填补了我国在这方面的空白。因此,我国SV~LBI 卫星也可以采取中继卫星多普勒跟踪方式来定轨。
2 地面测控网的研究
2. 1 我国卫星测控网的组成
我国卫星测控站主要由陆地固定测控站和海主移动测控站组成口.6J 。陆地上的固定测控站分国内部分和国外部分。国内部分分布在厦门、青岛、渭南(又称西安站)、酒泉、内蒙、和田和喀什,覆盖了全国疆土。国外部分有巴基斯坦的卡拉奇站、肯尼亚的马林迪站、美国的Goldstone 站和纳米比亚站以及日本VSOP2 项目中将采用的日本的Usuds 站、西班牙的Yebes 站和澳大利亚的Hobart 站。海上移动测控站由4 艘远望号航天测控船所组成,根据跟踪任务的不同而改变分布远望五号(取代远望一号)分布在日本海东南的太平洋上;远望六号(取代远望二号)在新西兰以东的太平洋上;远望三号在南非以西的大西洋上;远望四号在澳大利亚以西的印度洋上。地面VLBI 站是SVLBI 系统的另一个主要组成部分,为了最有效地获得观测灵敏度和uv覆盖,每个SVLBI 计划都将考虑吸收和组织全球范围内尽可能多的VLBI 站参加观测。中国科学院于1987 年和1993 年在上海天文台和乌鲁木齐天文台分别建成了25 m 口径射电望远镜,形成了我国的VLBI 固定观测站,它们将和昆明40 m天线和北京50 m 天线组成中国新一代VLBI 网。
2.2 SLR 测站网络组成
目前,星载激光定轨和星载GPS 动态载波相位测量是卫星cm 级定轨精度的有效途径的。我国的SLR 测站网络中包括了我国已经建立的武汉、上海、长春、北京和昆明等5 个激光测卫站,国际上在全球均匀布设了很多测站,它们目前能够开展激光测卫的工作。因此,建议在SVLBI 卫星上配备大量的激光反射器,从而实现SLR 对我国VLBI 卫星的精密定轨。但它们的最大测程仅达2 万km 左右山,必须经过改造,才能满足我国不同轨道高度的SVLBI 激光测卫的要求。
3 SVLBI 卫星轨道设计
3. 1 卫星轨道形状和大小的设计
SVLBI 卫星需要满足大地测量和天文观测的需要,所以属于空间科学探测卫星,而这种卫星一般采用大偏心率的椭圆轨道凶。近地点的选择一方面希望高度较低比较好,因为这样SVLBI 天线将与地面VLBI 测站形成的基线长度的变化范围大,有利于对射电源UV 平面的充分覆盖;另一方面,如果近地点高度太低,卫星轨道将会受到电离层的影响。地球最外层是电离层,高度范围在60~1 000 km 之间,在1 000 km 以上的高空中,电子密度很低[10J 因此,选择卫星的近地点高度为1 000 km 。远地点选择方面,对于SVLBI 卫星来说,需要最大限度地提高角分辨率来分辨射电源的详细结构,确定射电源核心并定义可观测射电掠,希望卫星轨道越高越好。但轨道越高,所接受的GPS信号也越弱,其定轨精度也越低,而高轨GNSS卫星的加入,如Galileo 系统,可以作为GPS 系统的补充,对定位有很大的改善作用。文献[11.12J曾研究了不同轨道高度的GNSS 系统对卫星的定轨精度,研究结果表明,卫星轨道高度过高时,GNSS 系统对卫星定轨的精度将会下降。为了准确合理地设计卫星远地点的高度,将在确定其他几个轨道参数后再来确定远地点高度。
3.2 近地点角距、升交点赤经和平近点角的选择
卫星轨道的近地点角距决定着轨道在平面中的指向和近地点的位置,可以在0 0 ~360。范围内选择。SVLBI 卫星设计的一个重要任务就是要增加南半球地面VLBI 对射电源的观测覆盖,因此,从轨道的南北方向来讲,轨道远地点选择在轨道最南端,近地点选择在最北端,这样在卫星周期中,大部分时间在南半球上空观测。因此,卫星轨道的近地点角距ω 取为90 0 。升交点赤经β 决定轨道平面的位置,平近点角M 决定卫星轨道参考时刻卫星在轨道中的位置,它们在00~360。范围内变化,只能根据具体要求选择其初始值。在轨道模拟仿真时刻(2008 年1 月12:00) 的升交点赤经0 设计为193.24 0 • 平近点角M 设计为0 0 。
3.3 卫星轨道倾角的选择地球非球形引力导致卫星轨道的长半轴在轨道面产生旋转,其表现是卫星的近地点角距ω 缓慢的进动,称为近地点进动。但当卫星轨道倾角i=63.4。时,轨道的长半轴不发生旋转,故63.4。为临界轨道倾角[刊, 11J 。因此,设计卫星的轨道倾角i=63.4 0来消除近地点进动,使得ω 恒为90 0 ,保证卫星近地点选择在最北端,这样在卫星周期中,大部分时间在南半球上空观测。
4 数据计算分析
通过前面的分析,可以初步设计卫星轨道近地点为1 000 km ,近地点角距ω 取为90 0 ,升交点赤经0 设计为193.24 0 ,平近点角M 设计为0 0 ,轨道倾角为63.4 0 ,至此, 6 个轨道根数只有远地点高度尚未确定。将卫星的远地点高度设计为2万km 以上,以1 000 km 为间隔,给出每一个远地点高度时卫星的各项指标。
4.1 星载GNSS 对SVLBI 卫星的定轨精度
由于伽利略卫星的轨道高度为24000 km 左右,当SVLBI 卫星离地面高度大于24 000 km时,将接收不到GNSS 的定轨信号,所以先考虑分析卫星远地点距离小于24000 km 的情况。本文模拟试验中,给每个GNSS 卫星设置一个简单的圆椎体传感器,角度为45 0 ,给SVLBI 卫星添加了一个高度角为一90 0 ( 即指向天顶方向)的天线,天线形状为圆锥形,顶角为90 0 。只有在天线覆盖范围内井满足强度(数据更新率不低于1 Hz)的GNSS 卫星的定位信号才能被接收到。根据
资料[时CISAS , 2007) , VSOP2 的测距精度应优于10 cm ,建议优于3 cm o 假设我国SVLBI 卫星在远地点的高度小于24000 km 时的测距精度也能达到3 cm ,根据定轨精度=PDOPX 测距精度来分析所能达到的定轨精度,见表1
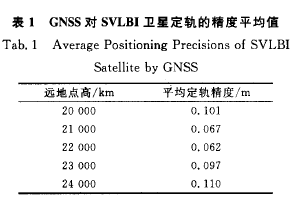
由表1 可以看出,当远地点高度小于24 000km 时,卫星的平均定轨精度大部分在0.1 m 内,能够满足地球动力学对卫星定轨精度的要求[叫。
4.2 SLR 对SVLBI 卫星的定轨精度分析
如果在SVLBI 卫星上安置激光反射器,通过激光测卫技术(SLR) 对卫星定轨,可以进一步提高定轨精度。表2 是我国SLR 测站网络对SVL~BI 卫星定轨的平均PDOP 值、平均精度和时间覆盖率(测距精度为2 cm) 。
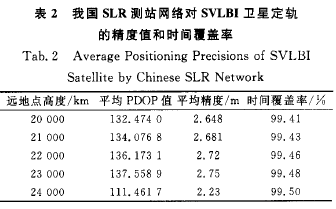
由表2 可以看出,由于地面SLR 测站之间的距离固定,分布不均匀,因此与SVLBI 卫星所形成的几何图形结构不是很好,所以PDOP 值比相应的GNSS 系统的PDOP 值大。SLR 测站对卫星的时间覆盖率都在99% 以上,能充分满足定轨需求。由于目前SLR 技术的测距精度较高,能达到2~5 cm[4] ,因此采用SLR 与GNSS 相结合对SVLBI 卫星定轨将有助于提高其定轨精度。
4.3 中继卫星对SVLBI 卫星的通信效率以及多蕾勒定轨情况分析
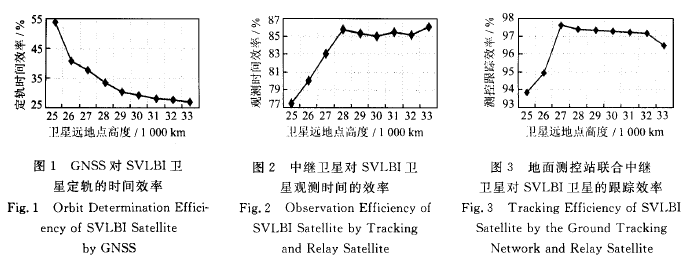
当卫星远地点高度比较大时,其接收GNSS 的信号比较少,此时单纯利用GNSS 对SVLBI 卫星定轨的精度不是很高,图1 是统计当远地点高度大于24000 km 时, GNSS 系统(至少4 颗GNSS 卫星)对SVLBI 卫星定轨的时间效率。从图1 可以
看出,随着远地点高度的增加, GNSS 对卫星定轨的效率逐渐下降,此时单纯利用GNSS 系统定轨将达不到卫星应用于地球动力学和大地测量研究的精度要求,还需联合其他定轨技术,如采取中继卫星对SVLBI J.!星进行四程多普勒定轨。
中继卫星对SVLBI 卫星进行四程多普勒定轨时,可以采用积分多普勒测量定位,因此,中继卫星对SVLBI 卫星测量的时间就很重要。图2是统计当卫星远地点高度大于24 000 km 时,中继卫星对SVLBI 卫星观测时间的效率。从图2可以看出,不同远地点高度时,中继卫星对SVL~BI 卫星的观测时间效率不一样,随着轨道远地点高度的变大,时间观测率逐渐增大,当远地点高度大于28000 km 时,观测效率变化不大。此外,还计算了当远地点高度大于24 000 km 时,地面测控站联合中继卫星对SVLBI 卫星的测控跟踪效27 000 km 时,测控效率变化不明显,基本为97%左右,说明此时远地点高度的变化对卫星测控效率的影响不大。综合以上分析,最终可以选取卫星远地点高度为28 000 km 。
通过以上模拟分析和计算研究,最终确定我国SVLBI 卫星的轨道参数见表3

4.4 SVLBI 卫星对射电源的观测率分析
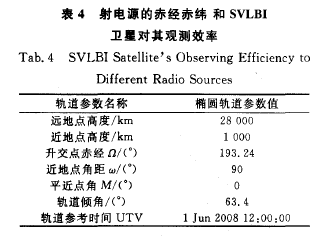
空间VLBI 卫星的一个重要任务是对射电源进行观测,因此,卫星对射电源的观测效率是衡量空间VLBI 卫星质量的一个重要指标。分别在北天区、赤道附近和南天区选择三颗射电源,其坐标见表4 ,计算我国SVLBI 卫星对不同区域射电源的观测效率。可以看出,卫星对不同区域射电源的观测率不同,其中对南天区射电源的观测率达到90% ,与所设计的SVLBI 卫星的目的相吻合,有效地弥补了地面VLBI 测站在南半球偏少的缺陷。
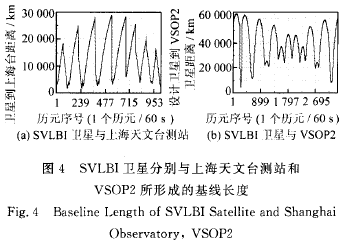
4.5 地·空VLBI 及空·空VLBI 对射电源观测的分辨率分析
空间VLBI 卫星的主要任务是联合地面VLBI 测站来对射电源进行观测,以便突破地面基线距离限制来提高观测的分辨率。对SVLBI 卫星与上海天文台的VLBI 观测站形成的空间地面基线进行了199 hCSVLBI 卫星周期与地球自转周期的最小公倍数)的统计(如图4 C a) 所示) ,其中最长基线长度为28735.4 km ,是地面VLBI 最长基线(大约10 000 km) 的2. 87 倍,分辨率提高了2.87 倍。此外,还计算了SVLBI 卫星与日本的VSOP2 卫星进行空空VLBI 观测的分辨率,统计了两颗卫星在62.25 hC 两颗卫星周期的最小公倍数)内形成的基线长度(如图4Cb) 所示) ,其中最长基线长度为63 345 km ,是地面VLBI 基线的6. 3 倍,分辨率提高了近6.3 倍。
5 结语
SVLBI 技术应用于大地测量和地球动力学研究时,最困难的任务之一就是卫星精密定轨。在SVLBI 卫星发射前, SVLBI 卫星的轨道参数应根据精密定轨的GNSS 系统卫星、SLR 站、全球地面SVLBI 网络等的变化不断地作更多的跟踪覆盖分析和调整。其次,在不久的将来,还应与国际上其他的SVLBI 项目进行合作,充分发挥SVLBI 技术的优势。
参考文献
[1] 魏二虎.我国空间VLBI 系统的有关设计和模拟计算研究[D]. 武汉:武汉大学, 2006
[2] 刘经商,赵齐乐,张小红. CHAMP 卫星的纯几何定轨机动力平滑中的动力模型补偿研究[J].武汉大学学报·信息科学版, 2004 , 29 (1 ):1-6
[3]周忠漠,易杰军,周琪. GPS 卫星测量原理与应用[MJ. 北京2 测绘出版社, 1995
[4] 郑勇. VLBI 大地测量[MJ. 北京:解放军出版社,1999
[5] 平劲松,河野裕介,河野宣之.日本SELENE 月球探测计划和卫星间多普勒跟踪的数学模型[1].天文学进展, 200 1, 19(3) :2-4
[6] 刘经南,魏二虎,黄劲松.深空网及其应用[1].武汉大学学报·信息科学版, 2004 , 29(7):565-569
[7] 刘基余婚娥"卫星绕月飞行的星载激光定轨法[C]. 中国宇航学会深空探测技术专业委员会第二届学术会议,北京, 2005
[8] 刘基余烯娥"卫星绕月飞行轨道的激光测定法[J J. 武汉大学学报·信息科学版, 2005 , 30 (1 0) :870-872
[9] 王希季,李大耀.卫星设计学[M]. 上海:上海科学技术出版社, 1997
[10] 刘基余.GPS 卫星导航定位原理与方法[M]. 北京:科学出版社, 2003
[11] Wei Erhu , Liu Jingnan. Design of Geodetic SVLBISatellite Orbit and Its Tracking Network[J]. Geospatial Information Science, 2008 ,11 (1) : 6-12
[12]杨颖,王琦.STK 在计算机仿真中的应用[M]. 北京:国防工业出版社, 2002
[13] ISAS. VSOP-2 Proposal Abridged English Version[OL]. http'; /www.vsop.isas.jaxa.jp/VSOP-2/ ,2008
[14] NAG. Precise Orbit Determination of RADIOASTRON[ RJ. Report of the RADIOASTRON NAG Group to the Eighth RADIOASTRON Meeting , Greenbank , WV, 1989
第-作者简介:魏二虎,毒虫瘦,博士,主要从事空阁大地测量和地球司刀学研究。
E-mail:ehwei@sgg.whu.edu.cn


 鹏翔新闻
鹏翔新闻


{kind=link}