������Ӧ��
�������ڣ�2020-01-17 16:06������ �����������
��7-1�����Ư��
�����������ʱ������ϵͳ�ĵ�Ƶ����Ҳ���dz�����ε��������T�����ϵͳ������ʱ�䳣��τ֮����Ϊ��Ҫ��

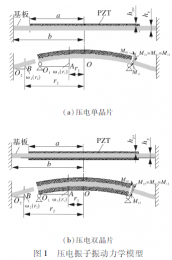
ͼ1�ǵ�ѹ�Ŵ�������ʱ�ĵȼ۵�·�����������ʱ�䳣��τ=Crin�ĸ�ͨ�˲����������������T��ʱ�����τ�dz���ʱ��������������������ʱ�䳣��τ��С�����������T��˵�����ܱ��ַ�ֵ������ָ������˥����
���ォ���������Ҳ����ӵ�ͼ1�ĵ�·�������˲��ֵ�������¹�ʽ��ʾ��

�����д����Ե�ʱ�䳣�������ϼǹ�ʽͼ�λ���ɵó��¼ǹ�ʽ��ʽ�п��Ե�֪τ/T��С�Ļ�����ֵ�����ͻ���Ӧ���Ϊ�˽���ֵ����������5%������Ҫ��֤τ/T�R7�����߿�����2%������Ҫ��֤τ/T�R16��
ͬ�������������β������ӵ�ͼ1�ĵ�·��˲ʱֵ���±�ʾ��

ͼ�λ������ϼǹ�ʽ��ʾ�����п��Եó���Ϊ�˽���ֵ��������5%���£���Ҫ��֤ʱ�䳣��τ/T�R20�����߿�����2%���£���Ҫ��֤ʱ�䳣��τ/T�R50��
���⣬ʹ�õ�ɷŴ���ʱ������ϵͳ�ĵ�Ƶ����ֻ�ɵ�ɷŴ���������ʱ�䳣�����շ�������Cf�뷴������Rf�ij˻����㣬Ҳ����τ=CfRf�����Ҳ�ɵõ�ͬ���Ľ����
�������˵����T=50ms�ĵ��������Ҳ��ij�����Σ�����2%�ľ��Ȳ�����ֵ�����������ϵͳ��������ݣ�����������+���µ���+�Ŵ�����������ݣ�1500pFʱ�ĵ�ѹ�Ŵ�����������裬����τ/T=16�����¹�ʽ��ʾ��

����Ŵ������������Ϊ100MΩʱ�������£�

����ѡ��Ӵ�̬����8000-1500=6500PF�����߿����ӳ���Ӧ���ȵĵ��¡����������������ѹ������ʾ�����Դ˱�����С��

���⣬����ǰ�÷Ŵ����ͼ��ٶȴ���������Ƶ����Ƶ��Ϊωc������ʱ�䳣��τ����ͨ�����¹�ʽ��á�


��7-2������
һ����˵������ѹ���ͼ��ٶȴ�����ʱ�Ὣ˥����h������͡���h��0.01������ܵ���������Ĺ��й���Ƶ�ʼӾ磬����IJ��λ������ԭʼ����֮�ϡ����������ײ������Ư�ƣ��⽫���Ƶ�Ƶ�εIJ��Ծ��ȡ���֮���Ӧ���ǣ�����������źŽ���Ӱ�쵽��Ƶ�εIJ��Ծ��ȡ�
����������С�ɳ�����ε��������T�ͼ��ٶȴ������Ĺ��й���Ƶ�ʵ�����Tn֮�ȣ�Ҳ����Tn/T��ֵ������

ͼ3�ǹ��ڵ��������Ҳ����ڴ����Ե�˥����h��Tn/T��ֵ�����仯ʱ������̶ȡ��ɴ˵�֪Tn/T��ֵ��Сʱ�������壬���Ҳ����Ӧ��С��
Ϊ�˽��������Ӱ�죬��Ҫʹ�ù��й���Ƶ�ʸߵĴ�����������ǵ��������Ҳ��Լ��������Dz�������Ļ�����ֵ����������10%������Ҫ���й���Ƶ�ʵ�����Tn��1/5T���¡�������5%������Ҫ1/10T���¡����磬��������200μs��������ij������������������10%���ڵĻ�����Ҫ������������Tn��40μs���£�Ҳ������Ҫ25kHz���ϵĹ��й���Ƶ�ʡ�������5%���ڵĻ�����Ҫ50kHz���ϵĴ�����������dz���������İ����Ҳ������Dz��Ļ�������������ǿ��еġ�����������ʧ��Ļ���������ߴ�г���ɷִ������Ĺ��й���Ƶ���п��ܼӾ磬��˴�����ѡ�ù��й���Ƶ�ʸ����и�Ƶ�����ıȽ����ס�
��������Ӱ�����һ��������ѡ��12dB/oct��18dB/oct�ĵ�ͨ�˲����������Ƶ��Ϊ����Ƶ�ʼ����������й���Ƶ��Լһ�룬ͨ����ͨ�˲�ʹ��˥����


 ��������
��������


{kind=link}