技术与应用
发布日期:2014-06-06 13:08 浏览次数:次
东京工业大学 中村 健太郎
1.序言
以往的超声波马达是通过摩擦力驱动,固定片压电振子与转子接触,通过振动摩擦转子从而获得旋转力和推动力。虽然具有高转矩、高控制性等特点,从原理上讲其速度无法超过振子振动速度。压电振子的振动速度最大可从几百mm/s到几m/s2,以往的超声波马达是无法超越这个速度的。另外还有一个不可忽视的是接触面的磨损问题。通常的接触式超声波马达适用于低速高转矩的控制应用,并不适合高速长时间旋转用途。这里介绍的悬浮式超声波致动器的振子与转子是非接触式,转子浮于上方,其速度可以达到振动速度的数倍甚至是10倍以上。另外还出现了替代空气悬浮平台的超声波悬浮式平台。无需空气泵以及管道只通过电源就可运转,构成了小型集成系统。另一方面,还在探讨使振动板在平滑面上悬浮的方式。
2.近场声悬浮现象
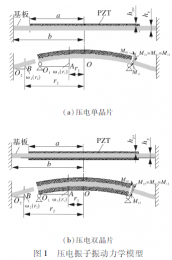
上述技术是利用了近场声悬浮现象实现了“非接触式”。首先对该现象进行一下简单说明。如图1中超声波振动面的上方悬浮了一块平板,悬浮距离与振动幅度成比例关系,一般在几10μm到1mm之间。悬浮物体重量增加时悬浮距离会相应变小。悬浮距离与板子重量的平方根成反比例关系。板子重量增加到一定程度后最终会接触到振动板。
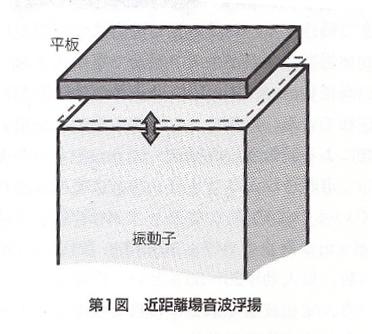
此时,我们设想当悬浮距离与振动幅度(0-p值)相同时能够悬浮的重量最大,那一枚邮票大小的面积可悬浮超过100kgf的重量。实际上由于振动面以及悬浮板存在弯曲等现象,能够悬浮的重量范围要比理论值小,但也还是可以保证使大多数物体悬浮。图2为弯曲振动面上悬浮硅圆板。能实现活塞振动的面积限制在一边或直径在4分之一波长大小,因此悬浮大面积的物体时会用到弯曲振动板。

图3为附带角笛的BLT换能器驱动弯曲振动板,在圆形或矩形的金属板上激励高频的弯曲振动。


此现象被作为展示用大型玻璃电路板非接触传输技术正在被进一步开发中。图4中长尺形振动板两端安装上附带角笛的压电振子,从一边驱动,另一边连接电气负载使之产生弯曲振动的行进波。驱动侧电源和负载侧阻抗相互交换后,振动传播方向会发生逆转。利用此振动体系,可以将平板物体悬浮在空中并从驱动侧向电气负载侧移动。图5中所示振动板与悬浮物体之间的空气层中产生了行进波传播方向的空气流。悬浮平板由空气流引导向水平方向移动。由此产生的推力具有空气粘性,并不是很大的推力。

3.悬浮式高速旋转马达的应用
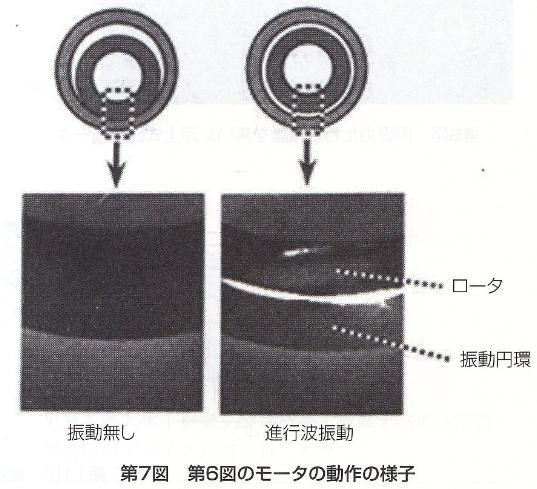
通过弯曲振动板使平板物体悬浮并传送这一技术被进一步研究,另一方面,应用这一现象也在深入研究旋转马达以及移动平台。将图4中的振动板换成圆环形状就可以制成旋转型马达。如图6所示,2个振子的间隔为4分之一波长,以90度相位差驱动圆环就会产生行进波。在振动圆环内侧的空气间隙插入转子。如图7在激励振动后转子悬浮,振动圆环直径约为60mm,图8为测量振动速度和旋转数关系的结果。每分钟3000次以上的旋转数可以得到0.3m/s的振动速度。换算成周速度的话,约为10m/s。由此可以看出该结构可以得到比振动速度大很多的速度。


应用圆形弯曲振动模式的周方向旋转可以实行元板型悬浮式马达。图9中所示相同直径圆板转子在悬浮过程中进行高速旋转。振动圆板的背面粘接有圆环状的压电陶瓷。如图9所示,4等分电极由2相电源驱动。由此振动模式还是旋转并产生近似周方向的行进波振动。
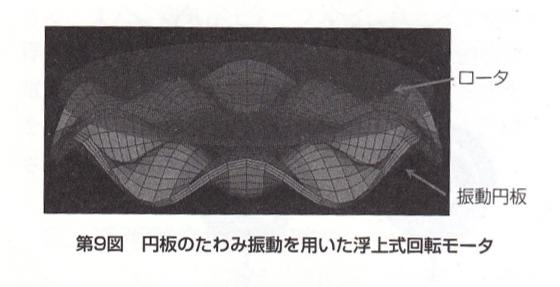

在此种振动模式下,当驱动相位差达到180度时旋转方向会发生逆转。
4.悬浮式线性平台的应用
精密加工中会用到空气悬浮式平台,图11展示的是由超声波悬浮替代空气悬浮。其原理与图4类似,只是将悬浮传送装置的悬浮平板换成了工作平台。如果仅仅是水平面的话,那横向的位置保持能力会不充分,因此在振动体上设计了斜面。另外,工作平台上放置被加工物体后,加之振动体时薄板时被加工物体重量使振动体弯曲,并接触到工作平台,因此需要保证振动体具有良好的刚性。横断面是以三角形优质陶瓷加工切削后制成的。压电陶瓷板粘接在振动体两侧,如图所示由压电片激励振动。由优质陶瓷做超声波振动体驱动的例子比较少,但是可以得到充分的振动幅度。悬浮式工作平台也是同样的材质。此款悬浮式工作平台可以达到100g的负重能力。

5.自动悬浮传送台
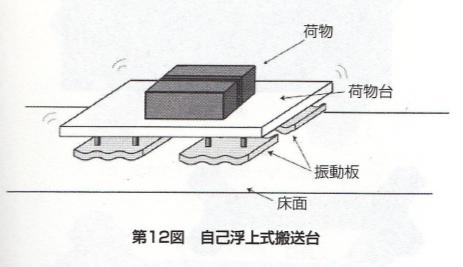
上述介绍的均为振动板上悬浮物体的技术。如果是在平滑的地面,将振动板反向放置后,振动板自身会悬浮起来。利用该现象,正在研发一种自动式振动板。工厂中会使用货盘运送零部件等产品,图12中是将自动悬浮式的货盘(货台)代替普通的货盘。货台是通过振动板和软质材料支撑。粘接了压电陶瓷的弯曲振动板4个可以达到10kgf以上的负载能力。因为地面一般情况下并不弯曲平滑,实际使用中会出现某部分与振动板接触的现象,但移动所需的牵引力只有十分之一左右的消减。一个振动板的耗电量为几十瓦。

6.小结
以上介绍了几个应用近场声悬浮现象的非接触型致动器、设备的应用案例。关于驱动频率大部分在20~40kHz之间,频率最高的也在100kHz以下。
虽然目前还没有将这种悬浮式致动器实现商品化,但是其非磁性、无需空气压缩机等特点势必会在今后被广泛应用。到那时,为实现应用要求需要进行数据模拟。对于振动面和悬浮物体的空气间隙很多情况下无法忽视振幅幅度的大小,因此有必要用到可以计算时刻移动接触面的方法。以往的线性声场计算方法是无法做到的,因此需要研究开发与之对应的数值计算方法。


 鹏翔新闻
鹏翔新闻


{kind=link}