1 引言
超声波马达又称超声电机(ultrasonic motor ,简称 USM) 20 世纪 80 年代才诞生的一种全新概念电机种类.超声电机采用与传统的电磁式电机截然不同的全新的原理和全新的结构形式,不需要磁铁和线圈,而利用压电材料的逆压电效应激发某种特定模态的超声振动,定子通过摩擦驱动转子运动,从而获得机械输出的一种驱动器[1]
超声波马达的应用是压电陶瓷发展的一个直接结果 利用外加交变电场,使压电陶瓷交变伸缩,超声波马达就是利用压电陶资的这种交变伸缩,这种伸缩振动的振幅非常小,所以超声马达要在谐振频率处激发超声波马达的定子振动.
虽然超声马达的定子的振幅只有 1μm 左右,但是由于超声振动频率一般都在 20 kHz 以上,所以超声波马达也可以获得很高的转速.超声电机具有扭矩/质量比大、结构紧凑、低速大扭矩、响应快、换向迅速、无电磁噪声干扰和控制性好等优点,在机器人、精密仪器仪表、医疗器械、航空航天以及新型武器装备等领域有着广泛的应用前景[2]
本文针对超声波电机的特点,设计了一套驱动控制电路,利用该驱动系统对所制作的超声波电机进行实验,得到了令人较满意的结果.
2 驱动原理简介
我们设计的超声电机是利用逆压电效应,逆压电效应是在压电材料的相应部位间加上电压,产生一定的电荷分布,材料会发生相应的形变,在此种压电材料上加上某种特定频率的交变正弦信号,材料就会产生随所加电压的变化规律而变化的机械形变.这种机械形变推动周围介质振动,产生疏密相间的机械波,如果其振动频率在超声范围,这种机械波就叫超声波.
3 超声电机对电路的要求
超声电机的应用离不开驱动电路,其特殊的驱动机理要求驱动器必须提供超声频段内的正弦交流电,驱动器通常为 DC-AC 型逆变器.驱动电路性能的优劣,不仅关系到超声电机的输出性能,也会影响其应用.对驱动电路而言,超声电机是一个容性负载,因此超声电机驱动电路的设计不同于呈电感性的传统电磁型电机的驱动器设计.
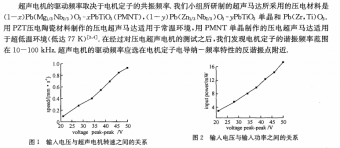
图一表明微型压电超声电机的输人电压(电压峰- 峰值)越大,转速越大;图 表明微型压电超声电机的输人电压越大,其输入功率也相应增大,因此如果想使超声电机的输出功率增大,就必须提高电压,具体数值取决于超声电机所采用的压电材料的性能,电压过高,会使压电材料破裂;电压过低,电机无法转动[5]
不同的超声波电机具有不同的驱动电压工作范围和最佳工作频率.因而,超声波电机驱动电路不仅要能够输出高频高压信号,而且其频率、幅值都应该是可调的.超声电机在实际工作中,必须通过控制电路进行调速.
4 超声波电机的驱动电路
根据以上压电超声马达的电学特性,我们知道,压电超声马达工作时首先必须在谐振状态下即外电路驱动与定子自身产生谐振,这样超声马达才能正常工作.压电马达的许多特性都与超声电机的谐振密切相关,最突出的一点就是工作时频率的范围比较窄,一般 2-3 kHz 左右.
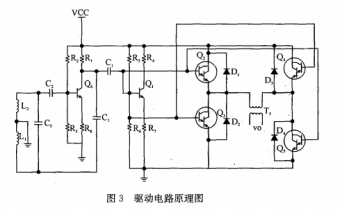
针对我们小组研制的压电超声的特点,使用 Multisim 模拟设计整个电路(如图 3). 驱动电路正常工作时,VCC 提供整个电路的电源,在实际使用中用干电池来提供直流电.这个电路主要包含 部分模块:信号的产生,信号的移相,功率的放大,信号的输出.
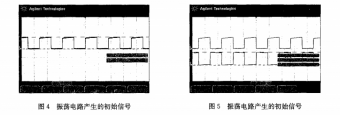
信号的产生是由 Ll L2 和 C5组成的振荡回路,振荡电路信号的放大是由一个 NPN 共射晶体管 Q6 和其他相关元件实现振荡电路信号的正反馈是从放大器的集电极通过一个电容 连接回 LC 振荡回路,经过放大后,输出单相信号(如图4).
将振荡回路产生的初始信号分出一路接入第 NPN 共射晶体管 Ql 之中,对输入信号产生了180 度的移相,从而我们得到了两路电压峰峰值相等,相位相差的信号,如图 5.
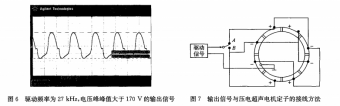
为了得到电压峰峰值比较高的超声信号,我们使用了所谓推挽式的逆变电路,即图 中由 对大功率的达林顿管Q2、Q3、Q4、Q5组成 组信号放大电路(Q2和Q5一组,Q3和Q4一组).将前面所得到的路相差为 180 度的信号用来控制这两组信号放大电路的导通和关断.因此当Q2和Q5导通,Q3和Q4关断时输出交流电压的正半周;当Q3和Q4关断,Q2和Q5导通时输出交流电压的负半周.所以Q2、Q5和Q3、Q4 轮流导通时,在小型升压变压器两端就可以得到交流电压信号(图 6). 另外,为了控制超声电机的正反转,我们使用单刀双掷的开关将输出信号与压电超声电机的定子连接起来,从而实现了超声电机顺时针和逆时针的切换,如图 7所示.
在理论上设计完电路之后,我们使用 Protel 将整个电路模拟设计成结构紧凑、装配元器件方便的印制电路板即 PCB 板,如图8 所示.因为我们小组设计的一部分微型超声马达只需要小功率的驱动信号(输入电压峰峰值小于 60 V) ,就采用低功率的电子元器件,即图 的电路实物图,还有一部分超声马达要使用大功率的驱动信号(输入电压峰峰值达到 160 V) ,我们采用大功率的电子元器件,所以电路体积要稍大一些,如图 10. 整个电路的输出电压峰峰值可以通过图 3的R8来进行调节.
5 结语
我们用设计的电路成功地驱动了小组所研制的压电超声电机,运转性能良好,实现了初期的目标,该电路易于起振、工作稳定、安全可靠,是较好的压电超声电机驱动器.
参考文献:
[1]上羽贞行,富川义朗.超声波马达理论与应用 [M]. 杨志刚,郑学论.上海:上海科学技术出版社, 1997:1-7.
[2] 赵淳生.超声电机技术与应用 [M]. 北京 科学出版社, 2007: 1 - 3.
[3] Luo L H, Zhao C, et al. Cylinder-shaped ultrasonic motors 4. 8 mm in diameter using electroactive piezoelectric materials[J]. Applied Physics letters, 2007 , 90: 052904. 1 - 052904. 3.
[4] Dong S, Wang S, Shen W, et al. A miniature piezoelectric ultrasonic motor based on circular bending vibration mode [J]. IEEE/ ASME Transactions on Mechatronics,2000(5): 325 - 330.
[5] 冯祖勇. PMNT 单晶的电致应变特性及其在压电驱动器中的应用研究[D]. 中国科学院研究生院博士学位论文,上海硅酸盐研究所, 2005: 113 - 128.


 鹏翔新闻
鹏翔新闻


{kind=link}