受单自由度超声波旋转电机的启发,1991年,东京农工大学的远山茂树教授[3]提出了用3个正交的单自由度圆环形超声电机按一定的方式组合来产生球多自由度运动的思想.其结构如图1所示.该电机由一个中空的球和3个环形的定子组成.定子被压在球转子上,3个定子的轴互相垂直.每一个定子由一个单自由度圆环超声波电机的定子组成,用来实现转子一个自由度的转动.1995年,远山教授[4]将最初设计的多自由度电机进行了改进,设计出了性能比较稳定的球形多自由度超声电机.随后,日本钢管公司等就该类电机在实用中的输出力矩和控制问题进行了深入的研究,提出了用光学传感器测量电机运动速度和采用非接触负反馈的控制方法来精确控制电机位置的方法,从而使该类电机进入商业化应用阶段,商品化的电机结构如图2所示[5].定子的直径为30mm,转子的直径为40mm,电机的工作频率为48kHz,在180Vpp(Vpp为峰峰值电压)的电压作用下,转子的旋转速度达250rpm,电机的输出力矩为40Nmm,最大输出力矩为80Nmm,每个电机的价格约为10万日元.
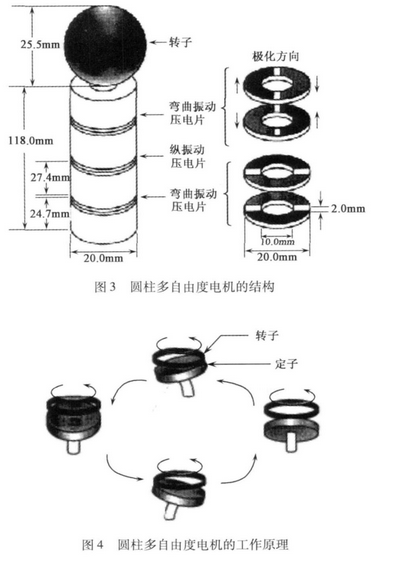
2005年,浙江大学的郭吉丰等[6]综述了多自由度球形超声波电机的研究进展,并开始进行该类电机的研究.2006年,傅平、郭吉丰等[7]从电机的工作原理和结构出发,利用坐标变换方法,推导出了球形多自由度超声波电机的驱动数学模型,并通过仿真分析,研究了电机的结构参数对其性能的影响.2.2 圆柱定子超声电机真正地用一个定子实现多自由度运动的超声电机最早是由日本东京工业大学的天野隆史[8]等提出来的.该电机定子的形状为圆柱形,其结构如图3所示,作用原理如图4所示.电机的定子由两个弯曲振动振子和一个纵振动振子组成,通过采用具有一定相位差的交流电压信号来激励压电片,可分别产生纵振动和弯曲振动,两种振动按照一定的时间和空间相位组合,在定子表面产生椭圆运动,激励转子产生多自由度运动.由于这种电机具有结构简单、实用性强的特点,引起了国内外研究者的关注[9—16].2001年,日本庆应大学的竹村等提出了圆柱形多自由度超声电机的驱动模型,用来估计电机的转速-力矩特性曲线、工作效率[10].2008年1月,竹村等发表了有关该类电机的控制和在外科手术支援方面应用的文章[11].2006年,日本丰田公司[12]展示了用多自由度超声波电机驱动的机器人手指.
我国南京航空航天大学的赵淳生院士[13]于2001年研制成功了国内首台圆柱定子多自由度超声电机,并在后续的研究中就该类电机的优化设计和控制问题进行了深入的研究.2007年,李志荣、赵淳生等[14]发表了有关定、转子表面接触角对电机工作性能影响的文章,提出了改善电机工作性能的方法.此外,东南大学的金龙[15,16]等也先后对这种电机的结构和驱动控制技术进行了研究.目前,多自由度圆柱形超声电机在机器人关节中的应用已成为超声电机研究的一个重要方向。
2.3 圆盘形多自由度超声电机
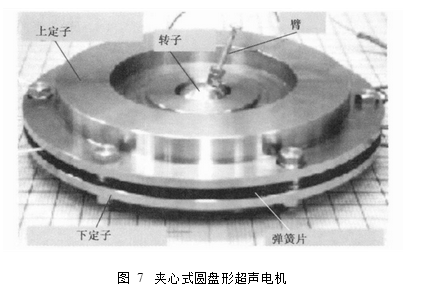
圆盘形多自由度超声电机是利用圆盘的不同振动模式组合来产生多自由度运动的.该电机最早由日本学者青柳等人提出[17].电机的结构如图5所示.电机的定子由圆盘、空心圆柱和压电膜组成.该电机采用圆盘的径向振动模式R1和弯曲振动模式B01、B′01的组合来产生转子的多自由度转动.该电机的工作原理如图6所示.为了实现这种电机的工程应用,2004年,青柳等[18]。在过去研究的基础上,将该类电机设计成夹心式结构,其原理样机如图7所示.这种夹心式结构的转子由2个具有相同结构的定子来驱动,转子的预应力和支持机构全部由两个定子来施加,大大的增加了转子的输出力矩.同时,省去了转子支持机构,使电机的结构变得更加简单,电机的输出效率得到改善.其z轴输出力矩可达69.7Nmm,x(y)轴的输出力矩为91Nmm.由于这种电机具有结构简单、体积小的优点.特别适合于对电机体积有较高要求的场合.

2.4 新型多自由度超声电机
随着多自由度电机的发展,各种方法被应用于电机的设计.2005年,前野隆司等提出用最优化的方法[19,20]来设计多自由度超声电机的思想,并将神经网络和遗传算法等优化方法应用到电机的结构设计中.然而,虽然优化方法可以计算出一种优化的电机结构,但由于机械加工的难度较大,工程实现困难.但是,在理论设计的基础上,他们设计出了一种
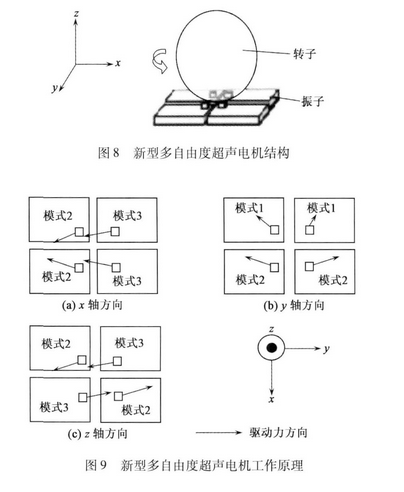
新型的超声电机,其结构如图8所示,工作原理如图9所示.该电机由4个振子和一个球转子组成.每一个振子由一个独立的单振动模式来驱动,其突起部分产生直线形往复运动.这些运动在转子与突起部分之间产生摩擦力,转子在合力的作用下,产生转动.由于每一个转子有三种振动模式,通过改变振子的振动频率,可以调整合力的方向,从而产生转子的多自由度运动.但有关它在工程方面的应用未见有新的报道。
3 多自由度超声电机的应用
3.1 在机器人关节方面的应用
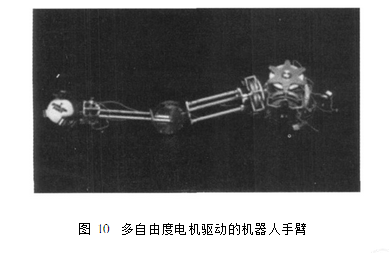
在某些特殊环境下,要求机器人的关节既具有简单的结构,又能实现全方位的运动,如高性能机器人的柔软关节和拟人机器人的腕关节、肩关节、胯关节等.多自由度超声电机的发展就可以满足机器人领域在这方面的要求.图10为用球形多自由度电机驱动的机器人手臂[5]。其中肩关节采用多自由度超声电机驱动.从图中机器手臂的构造可以看出,超声电机驱动的机器人关节具有十分简单的结构,可以直接和机器人的其他部位相连,而不需要安装复杂的机械连接装置.
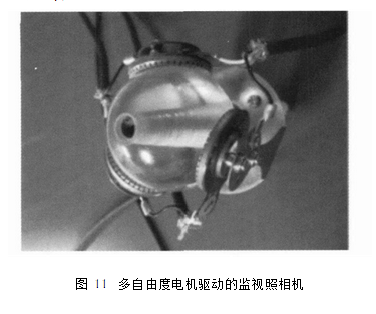
3.2 在监视照相机上的应用
随着单自由度超声电机在照相机自动聚焦技术上的成功应用,使超声电机的发展进入了一个新的阶段.同样,多自由度电机由于其简单的结构,也是用于监视照相机的理想驱动源.图11为球形多自由度电机在监视照相机上的应用[5].照相机的镜头与电机的转子相连,通过转子的多自由度转动控制镜头的运动。
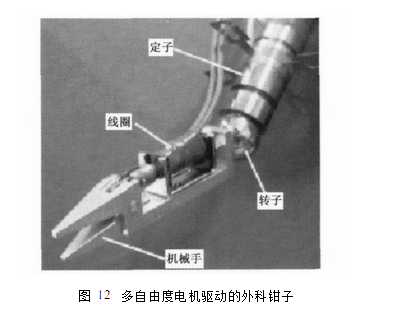
3.3 在外科手术方面的应用
多自由度超声电机可以用于外科手术方面.日本庆应大学的竹村等将研制的圆柱形多自由度超声电机应用于外科钳子[11],并提出用神经网络的方法来精确控制钳子的转动角度。
4 结论
虽然目前已发展了各种不同种类的多自由度超声电机,但是,多自由度超声电机的研究还处于初期阶段,为了实现多自由度的商业化应用,未来需要在以下几个方面开展工作:
(1)超声电机输出力矩的研究
电机的输出力矩是制约其应用的一个重要因素.只有研制出具有一定输出力矩、性能稳定的超声电机,才能使该类电机的应用更加广泛.根据目前的研究现状和应用中的要求,提高多自由度超声电机的输出力矩将是该研究的一个重要方面.
(2)多自由度球转子支持机构的研究
多自由度电机应用到机器人的关节驱动时,转子的支持机制是该类电机从研究阶段向实用阶段转化的一个关键技术.如何用简单的机械结构实现对多自由度转子的支持,如何在不限制转子运动自由度的前提下,实现转子的多自由度运动将是一个重要的研究方向.
(3)多自由度电机的运动控制在电机可以实现多自由度运动的前提下,如何实现高精度地控制电机的力矩、转动速度和旋转方向将成为该类电机向实用化发展的又一关键技术.
(4)多自由度电机的理论研究
虽然已经有学者就不同多自由度电机驱动数学模型和运动轨迹等进行了研究,但是,目前的研究还处于初级阶段,所给出的模型还无法完全解释超声电机的作用机理.所以只有深入进行超声电机的理论研究,更清楚地认识超声波电机的作用机理,才可能找到改善超声电机工作性能的有效方法,使该类电机的研究和应用进入一个崭新的阶段.
总之,随着人们对超声波电机的不断研究,超声电机技术将会不断发展,多自由度电机在工程中的应用将会越来越广泛。



 鹏翔新闻
鹏翔新闻


{kind=link}