技术与应用
发布日期:2008-02-20 13:24 浏览次数:次
关键词 摩擦磨损;声发射;刀具切削过程;数学模型
声发射方法是研究摩擦、磨损的重要方法之一[1],通过对摩擦和磨损过程中声发射信号的定性和定量监测,可以推测摩擦和磨损量的大小.作者在研究了金属材料间的摩擦、磨损声发射信号机理的基础上,对车削过程的声发射机理进行了探讨,给出摩擦和磨损过程声发射信号的数学模型,以及声发射信号的能量指标与外界加工参数之间的数学模型,为声发射方法在刀具切削状态监测中的进一步应用奠定了理论基础.
1 金属材料间摩擦和磨损时的声发射信号模型
从文献[2~6]和实验中得知,声发射源是一种材料内部由于受到外部条件作用引起的弹性波的瞬间释放,是可检测的.摩擦和磨损产生的声发射信号在较长的观察时间内呈伪随机状态[3],是由无穷多个小的声发射源在时间历程上的出现和迭加的组合,这不仅因为随机的声发射信号是由无穷多个小的冲击式的声发射源组成,而且由于声发射信号的产生实质上就是材料内部弹性波的瞬间释放造成的.
从数学上很难用确定的数学表达式描述声发射信号的模型,必须用统计的观点或方法来研究声发射信号与摩擦、磨损之间的定量关系.
由摩擦学可知,物体摩擦表面的摩擦应力为 τ=μp(1)
式中 μ为表面摩擦系数;p为摩擦表面法向正压力.
在材料线弹性条件下,两个物体接触的有效面积与正压力和接触物体的材质有关,因此,有效接触面积A与正压力之间的关系为 A=A0(p/p0)n(2)
式中 A0为接触物体未发生弹性变形时的接触面积;n为取决于材质的系数;p0为接触物体未发生弹性变形时所需正压力.所以,摩擦表面间的摩擦力可表示为
F=τA(3)
将式(3)代入式(2)
F=μpA0(p/p0)(4)
只有在摩擦表面发生相对运动时,才会产生摩擦功,单位时间内的摩擦功率可表示为W.=Fu(5)
式中 u为摩擦表面相对运动速度.
考虑到摩擦表面间的摩擦力和相对运动速度随表面间的物理特性发生变化以及促使表面发生滑动作用力的变化,式(5)中各分量应该为时间的函数,所以,瞬态摩擦功率可表示为
W.(t)=F(t)u(t)(6)
信号的均方根值(RMS)表示信号能量的大小,单位时间内声发射信号能量用统计参量RMS表示为W.RMS(t)=ηF(t)u(t)(7)
式中 η为摩擦功到声发射能量之间的转换系数.
由文献[7]中可知,摩擦磨损表面之间的磨损量VW与声发射信号的RMS之间呈非线性积分关系,即VW=α(t)∫W.β(t)RMSdt(8)
式中 α(t)和β(t)取决于摩擦表面是干摩擦还是润滑摩擦和磨损程度.式(7)代入式(8)VW=α(t)∫[ηF(t)u(t)]β(t)dt(9)
文献[5]中详细讨论了α(t)和β(t))在各种情况下的经验公式.
式(9)表明了磨损量的大小与材料特性和外界条件的关系,因此,在确知外界条件和材料特性的基础上,可由式(9)推测磨损量的大小,此式称为在声发射机理下,摩擦磨损的经验数学模型.
2 金属切削过程及塑性功
金属切削过程中,声发射现象主要是由于塑性变形、摩擦磨损和断裂引起,其中包括加工工件表面的塑性变形和与刀具加工面的摩擦磨损、切屑的塑性变形、断屑和缠绕引起的摩擦磨损,以及刀具的磨损和破损.除了刀具破损时有突发性声发射信号产生外,上述各种过程导致的声发射信号均为随机信号.设V(t)表示时域中的随机信号,ΔT表示某一时间段,则在该时间ΔT内,信号的RMS表示为
VRMS(t)=1ΔT∫ΔT0V2(t)dt1/2(10)
而信号的能量变化率正比于RMS的平方,即dE/dt∝VRMS(t)2(11)
式中 E为信号的能量.
对于一个测试系统,信号的实际能量应该为所测信号的RMST减去背景噪声的RMSn,即VRMS(t)2=[VRMS(t)2T-VRMS(t)2n](12)
由于塑性变形导致材料单位体积能量的增加为dW1=∑σidεi=σ1dε1=σ2dε2=σ3dε3(13)
式中 σ1、σ2、σ3为主应力分量;dε1、dε2、dε3为主应变增量;σi和dεi为应力和应变增量的张量表示.
对于体积单元dV,受到应力σij作用产生dεij的塑性应变增量,导致塑性功的增加为dW=σijdεijdV(14)
考虑一体积V受外力作用而产生塑性变形率ε.ij,则体积V的塑性功率为W.=∫Vσijε.ij,dV(15)
如果材料在恒应力σ作用下产生恒定应变率ε.,则能量率为W.=σε.V(16)
式中 V为发生变形的材料体积.式(16)表明声发射信号的能量率取决于变形率(应变率ε)、作用的应力(σ)和发生塑性变菜材料的体积.
3 正交切削过程声发射信号模型
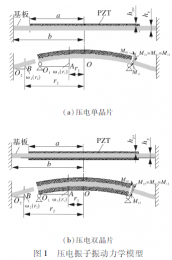
在正交切削过程中,刀具与工件接触形式及所用术语如图1所示.
图1 刀具切削过程示意图及术语
α__前倾角;φ__剪切角;u——切削速度;
uc——切屑流动速度;us——剪切速度;
t1——未切削切屑厚度;t2——切屑厚度
第1变形区中切屑的形成和在第2变形区中刀具表面的滑移以及刀具后刀面与工件的挤压滑移导致了声发射信号的产生,在3个区中,既包括摩擦也
包括塑性变形或两者同时发生.
在金属切削过程中,塑性变形的塑性功产生的声发射源的能量可由式(16)描述,而声发射信号的能量变化率可由式(11)描述,假设塑性功的一部分转化为
声发射信号的能量,则声发射信号能量可通过式(11)和式(16)与塑性功率相联系为VRMS(t)2=C1σεV(17)
式中 C1为比例系数.
3.1 第1变形区的塑性功功率
假定在稳态切削条件下,平均剪切应力(材料的剪切强度)和剪切区的剪切应变率保持不变,剪切应变率为γ.[cosα/cos(φ-α)](u/Δz)(18)
剪切变形体积为Vs=(t1/sinφ)Δzb1(19)
式中 Δz为剪切面厚度;b1为切屑宽度.
将式(18)(19)代入式(16),得第1变形区的塑性功功率为W.s=t1b1τkcosαsinφcos(φ-α)u(20)
式中 τk为材料的平均剪切强度.
3.2 第2变形区的塑性功功率
当切屑沿刀面运动时,先经过刀尖附近的粘滞区,然后,经过滑移区,直到离开刀具前刀面,这两个明显不同的切屑运动区域,导致了在刀具前刀面上正压力和摩擦剪切应力的非均匀分布形式,如图2所示.由于这两个区域内切屑运动的明显不同,先分别进行讨论,然后再加以综合分析.
图2 刀具前刀面应力分析
δ——前刀面正应力
τ——前刀面摩擦剪切应力
3.2.1 滑移区塑性功功率
在远离刀刃并承受较小正向载荷的刀具前刀面上发生滑移摩擦,假设在这个区域上,摩擦系数μ为恒定值,则切屑与刀具前刀面的摩擦应力τf为
τf=μσN(21)
式中 σN为刀具前刀面正向应力.则相应的摩擦力为F=τfAt(22)
式中 At为切屑与刀具前刀面的有效接触面积.

图3 刀具前刀面线性应力分布
由于刀面上的正向应力分布不均匀,因此,必须求出其在滑移区上的等效摩擦力.通常情况下,在滑移区的正向应力分布服从指数规律,如图2和图3所示,即
σN=ya(23)
式中 a为指数常数;y为从切屑离开刀面处到滑移开始处的距离.则由式(21),摩擦力τf可写为 τf=μσN=μya(24)
切屑与刀面接触的有效面积单元dAt在切削过程中发生变化,其值依赖于正向载荷N的大小,如图4所示.如果同样用指数规律表述有效接触区和正向应力的关系,则有 dAt=C2…yab(25)
式中 b为指数常数;C2为常数.
图4 切屑与刀具接触表面正向载荷的变化关系
当正向应力足够大以至于切屑与刀具前刀面完全接触,此时,假设实际接触面积dAt等于有效接触面积,摩擦应力也等于材料的剪切强度,即
dAi=dA[y/(l-l1)]ab(26)
式中 l为切屑与前刀面接触长度;l1为从刀刃到滑移区开始处的长度.有效接触面积可从切削宽度b1和长度微元dy中求出
dAi=b1dy[y/(l-l1)]ab(27)
作用于微元滑移区上的微元滑移摩擦力为dF=τfdAi=[μb1/(l-l1)]yb…(a+1)dy(28)
在整体滑移区上,摩擦合力为F=∫l-l10dF=∫l-l1μb1(l-l1)abyb(a+1)dy=μbb(a-1)+1(l-l1)b+1(29)
如果有如图3所示的在σN、dAi和y之间存在线性关系,则式(29)可简化为
F=μb1(l-l1)2/3(30)
在粘滞区和滑移区的边界处,切屑发生均匀变形,即τf=τk,因此,从方程式(29)可得τk=μ(l-l1)(31)
由式(30)和式(31)可得F=τkb1(l-l1)/3(32)
式(32)乘以切屑流出速度uc可得整体滑移区的摩擦塑性功功率W.c1=τkb1(l-l1)uc/3(33)
3.2.2 粘滞区塑性功功率
刀刃附近受到足够高的正向应力作用引起切屑和刀具表面的完全接触,这一区域称为粘滞区,这个区域内的切屑材料发生体积变形,这时,接触区域和摩擦应力为一常值,如图4所示.因此,在粘滞区的塑性功功率为W.c2=τkb1l1uc(34)考虑到uc=sinφu/cos(φ-α)(35)
式中 u为刀具切削速度;uc为切屑流出速度.
由式(33)(34)得在第2变形区的总塑性功功率为W.c=W.c1+W.c2=13τkb1(l+2l1)sinφcos(φ-α)u(36)
3.3 第3变形区的塑性功功率
在第3变形区内,由于刀具后刀面的挤压和滑移作用,在工件加工表面和刀具后刀面间将发生摩擦磨损现象,产生由于摩擦磨损作用引起的塑性功的变化,成为一个声发射源.设刀具后刀面与工件接触长度为w,摩擦剪切应力为τk,切削宽度为b1,则第3变形区的塑性功功率为W.t=τkb1wu(37)
因此,在正常切削过程中,3个主要声发射源发生的塑性功功率为W.=W.s+W.c+W.t=Cτkb1ucosαsinφcos(φ-α)t1+13(L+2L1)sinφcos(φ-α)+C′wc(38)
式中 C,C′均为实验待定常数.
3.4 小 结
声发射信号的能量E与其均方根值有式(11)的关系,而声发射的能量与金属变形塑性功有式(17)的关系,因此,可得出在正常切削过程中,声发射信号的能量指标RMS与切削过程中发生的塑性功功率的关系为 W.RMS=Cτkb1ucosαsinφcos(φ-α)t1+13(l+2l1)sinφcos(φ-α)+C′wm(39)
式中 m为调整指数,应视实验条件和测量测试系统精度而定.以上结论及式(39)就是在正常切削过程中声发射信号的能量指标与外界加工条件参数之间的数学模型,从此式中可以分析出影响正常切削过程中声发射信号各种因素的大小,从而加以控制和利用,以达到正确识别刀具切削状态的目的.
4 结 论
本文详细论述了金属切削过程声发射现象的机理,从摩擦磨损的角度出发,讨论了金属切削过程塑性功的表述形式,在对切削过程中的声发射产生机理进行分析之后,给出声发射信号的能量指标与塑性功功率的理论模型,从理论上描述了各加工参数和被加工材料的性能对切削过程中声发射产生的定量作用,为利用声发射技术监测刀具状态提供了理论基础.


 鹏翔新闻
鹏翔新闻


{kind=link}