技术与应用
发布日期:2007-12-05 14:19 浏览次数:次
在切削过程中,刀具的失效(主要包括磨钝、肢损和刀刃塑变或烧刀)与砂轮的过程工况(如砂轮与工件的接触、砂轮磨钝和砂轮修整控制等)的变化,对切磨削过程的正常进行 有重要的影响,例如:刀具失效引起机床周期性的停机换刀而中断切削过程;砂轮驱进和工件的进给速度控制影响磨床的加工生产率。工业统计证明:刀具失效是引起数控机床加工过程中断的首要因素,它占机床故障停机总时间的22.4%;砂轮与工件的接触监控可以提高磨削效率10%~30%。从80年代以来,刀具、砂轮的过程监视与控制技术和装置的研究与开发受到各国的重视。
为保证机床(特别是数控机床)和贵重与大型工件加工的经济性与安全性,要求对刀具/砂轮实施监视与控制。采用刀具/砂轮监视与控制装置后,可以避免75%引起机床停机的技术和人的因素的危害;可以有效利用第二、三班和部分节假日时间,使机床利用率大大提高。近20年来,机床,特别是数控机床,采取比传统加工更高的切削用量,使切削/磨削过程的“危险性”比传统的加工过程大得多。而大量难加工材料的广泛采用(至80年代初,这类工程材料占工程材料总量的43%),新型刀具材料(涂层硬质合金、Al2O3与Si3N4基陶瓷、金属陶瓷、立方氮化硼(PCBN)和金刚石等)的应用,增加了这种危险性。为保证加工系统、设备与工件的安全,提高机床利用率和加工生产率及加工质量,降低废品率和加工成本,减轻劳动强度,减少能源与材料的消耗,必须借助于刀具与砂轮的过程监视技术和装置。各国的实践已证明了其有效性、安全性和使用经济性。
1.切削力/扭矩实时监控系统
切削力(包括其分力与力矩)的实时检测值是切削过程动态优化的重要参数。同时,它表征了切削过程中刀具、工件与设备的工况状态,是重要的过程参数。切削理论的研究证明,切削力通常随着刀具磨损的增加而增大,在刀具破损时,切削力或切削力矩呈现瞬态下降的跃变。因此,常常用切削力或扭矩间接监视刀具磨损或肢损,并用它来监视切削过程状态或实现切/磨削力优化控制。基于切削力/磨削力的过程监视法有:
l)测定切削力变动量,监视刀具磨损,其灵敏度达到50µm;
2)测定切削分力比率,其磨损监视灵敏度达到20~30µm;
3)测定切削分力的功率谱峰值或幅峰值,其磨损监视灵敏度达到20~30µm;
4)利用小型化液体静力学元件(MIH-Cell)测定轴向力、侧向力和力矩,其灵敏度比半导体应变片高,分辨率达到4.5~11.2V/N(20~50V/lb)。
应变片、半导体应变片、压电晶体力传感器、加速度计和其他变形或载荷探测器件(如上述MIH-Cell)是常用的力与力矩传感器。此外,也有利用电动机驱动电流表征切削力的探测法。它们都属于功率/电流测量法。
基于切削力的识别方法有了较大的发展,如开发了切削力导数法,以走刀抗力Fx的导数值符号的变化来判断刀具磨钝;基于轴向力和扭矩的微分值的比较判断小直径刀具折断,用其积分和Cook方程判别磨损;和利用FFT分析切削力,按主峰幅值的变化和次峰出现状况进行刀具破损识别等。这类刀具监视仪已有商品供应。它们有灵敏、使用方便等优点。但其使用的主要障碍是确定识别/判断的阈值难,要求在不同的刀具与工件组合状况下进行数据采集与分析,以确定报警阈值。另一个困难是传感器的便捷安装问题尚待解决。
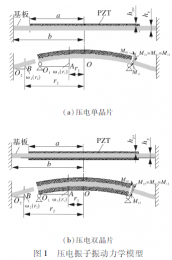
(1)以切削力为特征参数的刀具实时工况监视原理
1)切削力导数法:深入的研究证明,走刀抗力Fx对时间的变化率——一、二阶导数,有表征刀具后刀面磨损宽度平均值VB的功能,即相对于VB-T曲线的初磨损阶段,Fx表征VB变化的能力差;而在正常磨损阶段,Fx表现出无振动区和其后期的微动磨损有振区;在从正常磨损到急剧磨损转变点处出现二阶导数变符号的转变点,即正常磨损阶段,F”x(t)<0;而从急剧磨损阶段开始,F”x(t)>0。因此,只要发现Fx的二阶导
数值变化符号,就可以判定刀具进入急剧磨损阶段,若保持F”x(t)<0,则处于正常磨损阶段,如图1所示。
但是,在实用化条件下,当VB-T曲线不呈典型的三阶段分明关系时,上述研究结果的表征性能就差了。但在正常磨损阶段发生刀刃崩刀时,对上述判据如何修正,未见报道。
2)切削分力比率法:日本学者村幸辰的研究证明,选择Fx/Fz和FY/Fz为特征参数可以识别刀具磨损的VB值,即当VB不断增大时,Fx/Fz和FY/Fz两个切削分力比率随之增大,故它们可以间接表征VB值的变化。但是,这种方法的不足是:要求在不同刀具-工件组合与切削条件变化时重新研究确定切削力分力比率和刀具磨损状况的相关关系。
3)能量法:利用图2中的微动磨损阶段,Fx(t)出现振动现象的特点,用能量的变化表征微动磨损的出现,可以预报刀具磨损限即将进入急剧磨损阶段。
上述第1)与3)种方法只能表征刀具磨损转变点的判别问题,不能实现刀具磨损的实时测定。为此,基于第2)种方法,对走刀抗力进行自相关分析,建立自相关系数与VB值间的关系,以识别磨损值。但尚有两个矛盾未解决:1)如何实现刀具磨损值的实时校准测定?2)如何求出全部的磨损判据?美藉捷克人J.Tluety等人以功率谱分析为基础,对8齿端铣刀加工铸铁件(顺铣与逆铣两种方式)进行研究,得出切削力的功率谱在刀具破损后与未破损时的特征,如图2所示。
从图可知
1)第1、2主频率峰位置,不管刀具破损与否均不变,即第1峰均在300Hz处,第2峰均在600Hz处,但其切削力功率谱幅值有变化;
2)正常铣削时,第1主峰的幅值比刀具破损时小,后者比前者大60%~70%,第2主峰的幅值正常时则比破损时大近3倍;
3)在铣刀破损时,40~140Hz和400~600Hz段上出现次峰。
这一研究导致一种铣刀破损的识别方法,即在次峰频率段40~140Hz和400~600Hz上,以切削力的差值作为识别参数,进行铣刀片破损的识别。
(2)基于切削力的钻头磨/破损过程监视系统
1)监视原理:根据实验研究结果,选用钻削时钻头的轴向切削力T和切削扭矩M作为钻头磨/破损监视系统的输入特征参数,建立它们与钻头磨/破损值间的模型,按此模型确定判据阈值,可实现对钻头磨/破损的监视。
① 钻头磨损的数学模型——Cook方程。若钻削时钻头的轴向力为T,钻头后刀面的平均磨损宽度值为ω,按钻削实验数据可以回归得到以下方程(称为Cook方程):
T=3.185HBdf+7.399HBdr+0.022Hbd2+1.217HBdω (1)
ω=(ωa+ωb)/2 (2)
式中 T——钻头的轴向力(N);
HB——工件材料的布氏硬度;
d——钻头直径(mm);
f——钻削时每转的进给量(mm/J;
r——钻头刀刃半径(mm),典型值为r≈80.01mm;
ω——钻头后刀面平均磨损宽度(mm);
ωa、ωb——钻头锋(顶)、刃磨损带宽度。
由式(1)可得出
△T∝△ω (3)
② 当钻头折断时,轴向力T与扭矩M均瞬时下降为零。
③ 切削实验证明,深孔钻削和通孔钻削方式对切削力的影响小,可以忽略不计。
2)监视系统图3为钻头磨损与折损的监视系统框图。当主轴起动空运转时,自动平衡器使动态测量仪的输出自动调整为零。该系统的磨损监视数学模型为Cook方程,如式(1)所示。利用积分器改善系统探测的轴向力的波形。第一次钻削而钻头未磨损时,监视系统记录下轴向力的峰值Tm。在钻头磨损过程中,钻头的磨损值与轴向力遵从Cook方程,按照第一次钻削使钻头磨损的测得值求出轴向力的增量△T1,以(Tm+△T1)作为比较器的输入设定值。从第二次以后的钻削过程中,当积分器的输出值大于(Tm+△T1)时,比较器3向磨损鉴别器发出电平信号。若在0.3s时间内,连续大于(Tm+△T1),则判定为磨损,识别结果经交联(互联)接口送入机床NC系统,或与报警显示系统相连,发出报警指令。
该系统平行地采用两个微分器对轴向力T和扭矩进行并行处理,以便同时监视钻头的折损。比较器1与2的设定值仍按比较器3的设定法进行设定。当T与M的微分值超过输入设定值时,监视系统的识别子系统判定钻头为折损。同样,可以和机床NC系统或报警系统相连,发出报警信号。实验结果证明,该系统对钻头磨损的识别成功率达到87.3%。图4是美国匹兹堡Carno9ie-Mellon大学设计的基于钻削轴向力检测的实时钻头折(破)损预报系统框图。该系统用于CNC钻床上,试验用钻头为ф8.0mm(MT高速钢标准麻花钻),加工100mm×100mm×200mm的A1SI1045钢件,切削用量为。切削速度υ=15~16m/mim,进给量f=0.032~0.204mm/r,按程序进行孔的钻削,孔深h=24~25mm,为无切削液的干切削。压电陶瓷型动态测力仪装;于工件下,用来探测钻削时钻头承受的轴向力。检测信号经电荷放大器放大后,进行A/D(模数)转换,再输入电脑中。通过数字输入/输出(I/O)接口和4个继电器相连。第1个继电器是启动机床主机用的,第2个继电器是闭合连续启动电路用的,第3个继电器是闭合重新启动电路用的,第4个继电器是闭合保持电路用的。后3个继电器分别是供机床启动、停机和进给运动停止及退刀用的。该系统的信号采样频率为500Hz,其磨损识别模型仍用式(1)所示的Cook方程。该系统供钻头急剧磨损和折损(破损)监视用。
(3)车削切削力实时监控系统 图5是基于切削力检测的CNC车床车刀寿命监视系统。
上述研究和监视系统的试验证明,基于切削力/力矩的刀具工况过程监视系统与装置尚有以下关键技术要解决:
1)如何提高传感器的灵敏度;
2)如何确定保证高识别成功率的力/力矩阈值;
3)如何保证高转速下获取力的信号;
4)动态测力仪的改进,以适应低频力的测定,改进其安装性能,消除或降低它对加工系统动态刚性的影响。
2.功率/电流监视系统
它是一种利用主轴电动机或进给电动机有关变量(如电流、电压、相位、功率等)与刀具磨损、破损或切削过程颤振等工况的相关性,实现刀具工况、切削过程状态监视与控制的系统。此外,也有的监视系统是利用功率测得值换算成切削力或力矩,再按上述力/力矩与刀具过程工况或砂轮与工件接触状况进行识别。后者主要用于轧辊磨床砂轮与工件接触监视中。以功率/电流为基础的监视/检测装置是研究、开发和应用最早的监视系统,其代表的商品化装置或仪器有美国Cincinnati Mi1acron公司的扭矩控制监视装置(TCM)、瑞士机床公司(SMT)的切削监视仪等。由于这类系统具有成本低、使用方便、功能多等优点,一直为工业界和科技界重视与关注。其主要不足之处是灵敏度低,探测精度易受机床热变形的影响。针对这些不足,进行了不少的改进。

(1)主轴驱动与进给电动机可测参数 与电动机相关的参数有功率和电流等。它们受到载荷系统、机械变速系统(如齿轮变速箱、带传动副等)和控制电动机的电流等因素的影响。切削过程中,电动机的可测参数取决于它的类型。对于交流异步电机,以下参数是可测定的,但它们受载荷的影响:
1)输入功率P;
2)电枢电流I;
3)电流与电压的相位角φ;
4)转差率s
s=(n1-)/n1 (4)
式中 n1——同步转速;
n2——电动机转速。
5)相电压U。
(2)测量原理
1)积分功率法:对于、交流电机,其有效功率P可表达为
(5)
式中 U——电压;
I——电流;
Tm——U与I的周期。
式(5)可数字化为
(6)
式中 N——在一个周期Tm内采样的点数。
Uk与Ik的乘积的均值是该电动机的有效功率。
2)单相截面功率法:在任一时刻,同时采集电动机的三相瞬时功率,其和为此时刻电动机的有效功率。当电动机的三相负载平衡时,其各相电压,电流可分别表达为
(7)
(8)
电动机的瞬时功率P为 P=Pa+Pb+Pc (9)
利用式(7)与式(8)求解式(9),得瞬时功率P表达式
(10)
在三相负载平衡时,P与T无关,故在此假定下,可用单相功率表征电动机功率。这样可以简化检测系统,而达到相同的目的。若取ωt=π/2的截面时,可求得
(11)
为使检测结果准确,可多取几个截面,如:
式中 Um——相电压最大值;
Im——相电流最大值;
ω——角频率;
φ——功率因数;
t——时间。
3)实时瞬态功率法:它是对上述方法的改进,其原理是:瞬时功率P等于各相瞬时功率之和,而各相的瞬时功率Pk(k=1,2,3)可用瞬时相电流I与相电压U之积表达,应用霍尔(Hall)效应传感器(其线性响应频率为0~5kHz)将相电流转换成电压信号,采用有负相漂移的电压变压器把电压变换成相应的电压信号,再把它们送入快速乘法电路(AD532,其失真度<1%)中,实时计算出相功率的瞬时值。对于三相交流电动机,存在以下瞬态关系:
(12)
(13)
(14)
这类装置应满足以下要求:①有0~2kHz的频带宽度上的响应能力;②与电动机负载在电流上绝缘;③有衰减频率的装置,使获取的信号在识别频段上;④所有的电流、电压和功率测定值均有输出终端,可供分析或识别用。
利用FFT分析,寻找稳定车削与间断车削及铣削方式的不同切削条件下的频率特征,发现在118Hz处频率分量对应了转差率s,而200Hz处表征了切削振动,39.45Hz处的功率谱密度与刀具频率对应。利用压电陶瓷传感器测出的力/力矩(应变片)与主电动机功率或进给电动机电流信息进行对数功率谱分析,发现主轴电动机的功率与扭矩同进给电动机的电流的有很好的相关性。
4)电流测定法:有一类刀具工况监视仪,如瑞士机床公司(SMT)出的刀具状态监视仪(CFM),是以测定电动机电流为根据的。由测得的电流值计算切削力(也可以是X、Y、Z三个方向上的分力),建立刀具磨损与破损同电流变化率间的数学关系,以此作为识别模型。所用的传感器采用主电动机输入电流或伺服电动机的伺服放大器电流作为输入。SMT的研究认为,进给力(电流表达)比主切削力(电流)更灵敏地反映刀具肢损工况,如加大进给力4倍使刀具破损时,主切削力只增大25%。CFM系统是采用自学习型的工作方式。学习时,控制计算机记录下电流或由电流折算的切削力值,并设置刀具破损、刀具磨损和最大磨损值三个阈值。它适于粗加工刀具的监视,其识另吩辨率为0.5~0.7kN,例如切削钢件时,当进给率f=0.3mm/min,切削深度αP=1mm时,切削力为0.6kN。切削实验表明,后刀面最大磨损值与进给力(Fx)的相关系数为0.93,后刀面的平均磨损宽度VB与进给力(Fx)的相关系数为0.85。
综上所述,对于交流电动机,切削过程的监视可采用电动机的变量谱中的一些参数,它们主要有:
1)电动机的功率/电流的瞬态值或平均值;
2)电流与电压间的相位角;
3)检测一定功率谱分量频率的变化等。
其测定方法有:
1)并联法测电流;
2)通过磁通量检测电流;
3)用电流表或功率表测定;
4)用功率表测定功率。
传感检测电动机相应的参数,可以成功地实现刀具破损的探测。传感伺服进给电动机的电流可以探测刀具磨损。但这时要求电流与刀具磨损值呈正比关系。对于小直径刀具,电流随刀具磨损的变化不明显,这是功率/电流法的不灵敏区。此外,有很多研究证明:
1)在刀具极度磨损或破损时,进给力比切向力增大得更多。
2)机床热分布的变化和机床的温升对电动机电流测量影响相当大,特别是热对进给驱动电流测得值的影响比对主轴驱动电流的影响更大。
(3)监视系统功率 监视系统的组成框图如图6所示。它利用互感器构造的检测传感器检测电动机输入电流、电压和相位值,对这些测得值进行模拟变换,使检测到的模拟量整流为接口电路可接受的信号。同时提供信号采样的基准同步信号。通过接口电路与电脑互连。

相位检测监视系统如图7所示。检测到的电压与电流信号经整形,再经接口电路与计数器,输出给电脑进行识别判断。当电脑识别而应发出报警时,通过报警单元发出报警。该识别程序采用固化方式存在电脑中。该系统已用于大型龙门刨铣床,其识别成功率达到90%以上,识别分辨率为1%。
3.声发射实时监控系统
(1)切削过程声发射的特点 如前所述,切削过程是在一定能耗维持下的非平衡态时变的动力学过程,它有如下特点:
1)切削过程声发射检测传感系统探测到的声发射(AE)信号是低信噪比、幅频特性变化的信号。由于切削过程刀具与工件、切屑与前刀面时变的摩擦,前后刀面的磨损、切屑形成、断裂或缠绕工件、切削方式(连续与断续切削,顺铣与逆铣等)和切削条件的变化等,几乎所有伴随切削过程而发生的力学现象都会引起AE波的发射,在它们不是监视参数时,都形成噪声。再加上各种机、电、磁、声的干扰,使检测到的AE信号是低信噪比的。同时,由于刀片材料制作和刃磨质量的变动、工件材料性质的波动、切削条件的变化等,引起AE信号的幅频特性在一定范围内变动。
2)信号识别中的模糊性。AE传感器探测到的AE波是屡经传播、反射、折射和频散作用后畸变的衰减AE波。根据对这种AE波响应输出的AE信号进行工况识别时,往往在工况划分中存在中介过渡性,形成划分上的不确定性,即模糊性。
3)生产现场的强干扰。机械加工车间现场存在多种干扰,如各种机械冲击与振动、背景噪声、气液系统泄漏、各种电气设备频繁地起停、电源的电压和电流的波动等等。因此,现场的机、电、磁、声干扰,特别是它们中的瞬态强干扰,常常淹没或混叠了识别要求的特征AE信号,造成这类监视系统高误报率、低的工作精度,严重时,使AE监视系统无法连续稳定地工作。
实验证实,切削过程AE信号的频带宽,从几赫到几十兆赫。为了综合考虑AE检测、信号处理识别系统的实用性与经济性,切削过程刀具监视与控制系统常采用几十千赫到2MHz频段内的AE信号。可以近似地认为,正常切削过程发出的AE信号是连续型的AE信号,而刀具磨损达到急剧阶段或刀刃破损时主要发出非周期性的突发型AE信号。两类信号相比,后者的电平往往显著地大于前者。实验测定,在加工钢、铸铁等工件时,多种硬质合金车、铣、镗刀, Al2O3基与Si3N4基陶瓷刀异常磨损、破损时发出的信号峰值在(80~700)kHz之间,幅值电平为0.5~7.5V(当增值为40~60dB时),信号长度为十数微秒至数毫秒,并呈非周期的突发型特征。机械冲击和振动噪声峰值频率主要在100kHz以下,电气装置干扰噪声的峰值频率则在1MHz以上。
(2)切削过程刀具工况的模糊识别 虽然,刀具异常磨损和破损时发出特有的AE波是一个客观存在的物理现象。但由于上述原因,探测到的AE信号是随条件而变化的。在进行AE特征信号分析时,很难用AE信号的频率、幅值或振铃记数值、包络检波的波形参数等常规的特征参数的严格分明的阈值,来确定刀具的实际工况。换言之,在模式识别时,AE信号与其信号处理后的数据信息同工况的分类间存在连续的过渡状态,找不到明确而肯定的特征界面。这种现象可称为工况识别的中介过渡性。正是这种表征刀具工况的AE信号及其处理后的数据信息间存在着中介过渡性,形成类划分中的中介过渡性引起的不确定性,即模糊性。这种模糊性引起的不确定性同随机性引起的不确定性有质的区别。如果不考虑这种模糊不确定性,实验结果统计证明,按振铃记数w划分的识别成功率为60%~80%,按AE信号的包络检波峰值Ap,进行识别时的成功率则为50%~80%。为达到实用化要求的工作精度,必须研究如何提高识别成功率。为此,应该考虑AE信号识别中的模糊性问题,故不能采用精确数学或概率统计方法描述切削过程的AE信号特征。
图8表示了一种智能化模糊识别系统。它是建立在一系列规则基础上的识别系统。该系统包括经信号处理的AE信号离散模糊输入集、暂存器、知识库、模糊推理机和输出集合。
若以字母或数字符号下带“~”号表示模糊数、模糊集或模糊关系,如表示模糊数, 表示模糊集合,表示模糊关系等。图8的系统输入集为中包括表征切削状态或刀具工况的模糊输入向量。
(15) 式中
的分量的模糊子集(i=1,2,…,n;j=1,2,…,m)。该系统的输入可以包括非模糊的真实数、统计量,也可以包括离散的模糊子集,如包络检波幅值 :{极大、大、中、小}或={Huge,Large,Medium,Small}。暂存器的输入有经自适应处理的AE信号和按辅助规则开发的其他辅助信息,如AE信号包络检波的幅峰值、均值等。规则集合R和知识库Dk由咨询与经验总结后建成。暂存器也可实时学习,并按预定的规则推演。规则采用“if…than…”的逻辑语句关系式表达。对应于输入的输出结论的隶属函数μ(φi)可表达为
(16)
给定输出的λ截集后,监视的结论函数yi为
(17)
从式(17)可知,λ截集使模糊输出变成清晰的、明确的结论。
(3)声发射刀具综合监视系统 图9是我国研究开发的MT-8000型声发射刀具综合监视仪的系统框图。它采用外装式宽带AE传感器,并安装在机床主轴端盖或轴承座、车床刀架座上,可完成车削、端铣、镗削、立铣、钻削与机动攻螺纹等多刀具的实时监视。检测到的AE信号经放大、选频滤波、带通滤波、快检波与振铃记数电路后,进一步经信号处理,通过接口电路与电脑相连接。在智能化识别系统的控制下,进行实时刀具异常磨损、破损(或折损)的监视,一旦电脑识别判断发生异常工况时,就通过报警与显示单元发出报警指令。同时,通过互连接口同机床NC装置系统实现信号传输,由NC系统完成停机换刀或起动与工序变换等工作指令的译出。

这种实时监视系统可用于FMS线上的立式与卧式加工中心、CNC车床及车削中心等。它具有强的抗现场机、电、磁声干扰能力,能高精度、稳定地完成多种刀具工况的实时监视与控制,是一种实用性强的综合型监视仪。
4.机器视觉监视系统
人们通过视觉、听觉、触觉、嗅觉和味觉器官从外界环境获取信息,经大脑处理与识别而认识客观世界。在现代人工智能技术中,仿人视觉的机器视觉占有重要的地位。从本世纪50年代开始,它获得了迅速的发展。从本质上讲,机器视觉是一个序贯的对外部世界描述和转换的过程,它最终给出观察的景物的高度概括的描述,使机器视觉获得对客观环境的理解。因此,机器视觉不能简单等同于图像处理。后者指的是图像到图像的变换,并不包括对外界环境物体的识别、研究或操纵。
人生活在三维空间中,并能理解与把握它。仿人的机器视觉也必须能理解三维空间信息。人的视觉把二维图像世界呈现在眼球网膜上成二维图像。人脑必须从这一二维图像出发,形成三维空间的模型。因此,称仿照人脑从二维图像构造,并理解三维世界模型为机器视觉或计算机视觉,也称为图像理解。机器视觉在智能机器人、制造过程监视与控制中有广泛的应用前景。
(1)机器视觉系统 视觉信息包括视野范围内的亮度、颜色和距离等。人眼视觉系统包括光电变换系统(视网膜的一部分)、光学系统(焦点与光栅的调节系统)、眼球运动系统(包括水平、垂直和旋转等可控运动)、信息处理系统(从视网膜到人脑的神经系统)。机器视觉系统的硬件系统如图10所示。摄像机有两类。一类是工业视像摄像机(Vidicon Camera),它由摄像管和相应的电子线图组成,其输出为标准的电视信号。它的光谱敏感范围在300~700nm波长,景物发射出的光聚焦在对光敏感的靶上,形成图像,由电子束对靶进行扫描,将图像转换成串行的电信号。光敏感靶、电子枪和电极等均置于真空的摄像管内,故视像摄像机体积较大,且易碎而怕震,当电子束偏转时还会有时间漂移。此外,其使用寿命和平均无故障工作时间较短。第二类摄像机是固态摄像机(Solid-State Camera),其代表性的是电荷耦合器件(CCD)摄像机。它有一维的线阵CCD或二维的面阵CCD。CCD是一组离散光敏感元件的阵列。当光照射到其上时,每个光敏感元件产生与照射度成正比的电荷。这些电荷聚集在每个元件下面的电容器中,利用两相时钟脉冲把阵列光敏感元件上的电荷顺序地传送到放大器的输入端。放大器输出端发出表征图像的电压时序信号列。CCD的光谱敏感波长范围是420~1100nm。CCD摄像机有体积小、重量轻、抗冲击、寿命长、可靠性好、无电子束偏转漂移和元内部高压等优点。此外, CCD摄像机耗电量少,一般只需几十毫瓦即可启动。但其主要缺点是光敏元件灵敏度不一致性可高达10%。尽管可以逐个校正像素的灵敏度,但要多耗费计算机的机时。一般认为,CCD摄像机更适合于机器视觉系统应用。机器视觉与电视的标准形式一致,除特定的工业用摄像机外,像素不是正方形的,而是长方形的。要注意到这一特点,否则会导致识别或定位误差,甚至造成识别或定位上的困难。
输入图像经A/D转换器转换成数字量,变换成数字图像。通常,机器视觉的一幅图像被划分成1024×l024、512×512等,其各点的亮度用8位二进制表示为256个灰度。由距离测定器得到图像的距离信息,用彩色滤光片获得色彩信息,将这些信息送入图像处理器中,完成数据处理并提取特征。常用计算机完成图像的处理。在实时图像监视与控制中,多用专门开发的高速图像处理器代替计算机处理图像,以缩短处理时间。如利用专用处理器进行求取图像边缘的局部处理。常用LISP语言完成图像特征的分析和物体种类与位置关系的求取。为适应动态观测,机器视觉系统应具备以下能力:
1)适应被观测对象距离变动的调焦能力;
2)按亮度调节光圈的能力;
3)放大率调节能力;
4)旋转或移动选取视场的能力。
(2)过程监视用机器视觉系统 在制造过程监视中,机器视觉系统主要用于:
1)零(工)件安装位姿、装卡正确性监视;
2)物料传输位置正确性和物料装卸同机床干涉监视;
3)刀具选择正确性与磨损监视;
4)制造单元或系统安全监视与运行状态监视;
5)质量保证系统监视等。
利用机器视觉监视刀具磨损/破损有以下优点:
1)有测量柔性,可适应多种刀具和多种规格刀片的监测;
2)可以同新刀比较、获取绝对磨/破损值;
3)测量分辨率高,可达10μm或更高的量级;
4)是无损型的检测。
其主要不足是:
l)尚难于进行实时监测;
2)对现场环境光场要求较高。
图11是利用机器视觉的刀具磨损监视系统框图。被测刀具(或刀片)安装在显微镜工作台上,被一精密夹具定位卡紧,以保证多次安装测得值的一致性。利用光纤照明束对准被测表面。显微镜采用12倍放大光学系统,其目镜端安装488×380像素分辨力的固态摄像头CCD。其输出连接到基准调节器(校正器),以消除与图像分析系统的不同步。图像分析系统采用高性能的图像处理与计算机系统。计算机系统中装人图像处理指令与刀具磨损分析处理软件。该系统识别前后刀面磨损的最大重复性误差为4.2%~7.8%。
5.切削区噪声监视系统
通常把声发射法、切削区噪声法、超声波探测法和激光声振法统称为声振分析法,其物理基础是声物理学。下面主要介绍噪声分析法的监视系统。
(1)切削区噪声分析原理 它是从模仿操作者根据听觉信号监视机床工况和刀具工况的方法提出的,其基础是语音识别技术。它利用传声器作为传感器搜集切削区的噪声信号。传声器无接触地置于距刀具一定的距离上。传声器输出的噪声电信号经选频滤波等处理后,利用语音识别技术提取特征信息。一旦建立起特征参数与切削状态的关系,就可以进行实时识别。
(2)机床运作过程和刀具工况的噪声监视 有经验的操作者可以凭借自己的听觉,不仅可以判断机床是否已启动或停止,主轴是否运转着?工作台是否运动?刀具是否在进行切削?换刀运动是否在进行?……,而且还可以从切削区发出的噪声中识别切削过程是否正常?刀具是否磨钝或破损、折损?甚至可以判断正在进行什么工序加工等等。从这一事实出发,仿人的听觉和人脑的噪声识别,就产生了切削区噪声识别监视法。
机床运行和切削时,切削区的噪声包含了多种机床运行过程状态与刀具工况的信息,可以利用多模式的模式识别技术对之进行正确的识别。但为了监视的可靠性,切削区噪声监视系统有如下特征:
1)为避免人谈话声的影响,不采用人类语言频段作为噪声信号处理频段;
2)利用谱分析技术获取切削过程各种工况的声模式;
3)采用价廉而可靠的硬件系统。
(3)声监视系统图12表示一种立式加工中心用的噪声监视系统。该系统由传感切削区噪声的传声器、声信号预处理与识别单元、判断单元、期望声顺序发生器、NC数据库和输出单元组成。系统的信号采样频率为160~5000Hz,采样时间间隔为100μs,采样点数为256。该系统在切削实验基础上,离线分析建立62个标准模式,存入数据库中供实时识别用。该系统声模式的建立针对立式加工中心的立铣、钻削和端铣工序不同的刀具一工件组合和不同的切削用量,现场录取这些工序和不同组合条件下机床起停、正常切削、刀具破损或工况异常的噪声信号。它能完成工序识别和刀具工况识别。该系统监视循环时间为1s,在立式加工中心中应用的识别成功率为80%~90%。在CIRP会上,该项研究被专家们认为是可以实用、有应用前景的过程监视技术与装置。
6.砂轮/刀具-工件接触监视
传统的砂轮与工件接触监视与控制是由操作者根据实时获取的视觉、听觉或手感觉信息,手动完成砂轮横向快进给到工作进给(简称工进)的转换,或由横向进给装置、开环控制系统实现这一转换。前者主要依赖于操作者的经验和技艺,后者靠预置提前量,即在砂轮与工件真实接触前留出一段工进的空程。但是实践证明,减少或消除这一空程可以提高磨削生产率10%~30%。同时,若能实时检出砂轮一工件的接触信息,还可以降低加工成本,保障机床设备、工件和操作者的安全,实现磨削循环自动控制和走刀次数的自动分配。减少或消除工进空程的方法有:
1)利用在机安装的计量仪直接检测被加工尺寸,控制磨头完成无空程磨削;
2)利用接触电阻、电感、电容、涡流、磁通等传感器检测砂轮与工件的接触器信号,实现无空磨削;
3)利用力/力矩、功率、振动等传感器检测砂轮/工件接触信号,实现空程消除;
4)利用激光等光视方法、接近或接触式传感方法实现空程消除或减少;
5)利用AE传感器检测工件/砂轮接触信息,进行无工进空程磨削。
近10余年的研究和应用实践证明,声发射(AD法能较好地满足砂轮-工件接触的检测要求。AE法的特点是对砂轮与工件接触瞬间的响应快、灵敏、使用简便。实验表明,力法检测的力信号比AE法检测的AE信号响应时间滞后数十毫秒,且AE信号比力信号敏感。电流/功率法比AE法的信号响应时间滞后0.8s,且灵敏度更低(目前的技术水平是,当接触引起的功率信号变化小于1%的砂轮回转总功率时,无法感知)。80年代中后期以来,各国开展AE接触监视法和装置的研究与开发,如意大利的马尔波斯公司的E20型砂轮接触检查仪、中国的MJ型声发射接触监控仪等。
(1)声发射接触监视原理
1)利用砂轮与工件接触瞬间声发射现象的凯塞尔效应,即利用AE信号出现明显的瞬间阶跃特性进行识别。
2)由于砂轮与工件接触瞬间AE信号快速响应的能力,可在0.3ms以内实现响应,接触分辨率≤2μm,故可以高精度地实现接触监视。
3)接触检测利用砂轮与工件接触时的微切除过程或固体物理接触过程的声发射(AE)被高精度AE传感器(如中国专利AE-01型宽频带高精度声发射传感器)检测获取接触数据信号,在规定的特征频段上对AE接触信号进行识别,并采取有效的抗干扰措施,提高接触识别的精度。
4)利用互连接口可以实现砂轮与工件接触的控制。
(2)MJ型声发射接触监控仪 图13是MJ型声发射接触监控仪的系统框图。它由AE-01型高精度声发射传感器(频率响应范围为≤1.5MHz)、前置放大器(高通截止频率为100kHz、衰减斜度为18dB/OCT)、主放大器、带通滤波器、鉴幅器、识别器、显示报警单元和与NC系统互连接口组成。该监控仪经工业试验验证和应用验证证实,在砂轮与工件接触间隙δ在-10μm<δ<0时,在100次有限抽样次数的报警成功率达100%,响应时间≤0.3ms,并可以同磨床NC系统实现互连,完成砂轮-工件的自动监视控制循环。应用证明,它可提高磨削生产率10%~30%。
7.切削过程温度监视系统
切削过程中,随着刀具磨损的增加,后刀面与工件的接触面积亦增大,切削摩擦加剧,切削温度上升。切削温度与刀具磨损问存在一定的相关关系。它是利用切削温度监视刀具磨损的物理基础。
(1)切削温度检测方法
1)热电偶法:进行切削时,刀具与工件的接触组成热电偶。但这种自然热电偶表征的温度不适于刀具磨损的监测。原因是由刀具与工件组成的自然热电偶测得的温度值与刀具后刀面磨损宽度间的关系相当复杂,有时还呈现无规律状态。引起这种状况的根源是:①所测得的温度只是刀具与工件接触区各接触点的平均温度,在刀具磨损增大时,同时接触面积也随之增加,有时使热电偶测的平均温度反而下降;②不同的刀具和工件组合,变化的切削条件均使热电偶发生变化,使其与VB的关系复杂化;③在利用不导电的陶瓷刀等刀具时不能形成上述自然热电偶,且由于冷却润滑液的利用经常破坏了温度与刀具磨损间的关系。
因此,热电偶法多用人工热电偶。在距刀刃一定距离处预置小型热电偶,利用它测定切削过程的热电动势,可以消除上述自然热电偶的弊病;
2)热电动势法:它是利用人工热电偶直接测定刀刃附近的热电动势(mV),通过实验建立热电动势与刀具磨损值间的数学模型。按照这一模型,可以实现基于切削温度(热电动势)的刀具磨损监视。但在监视信号的处理中,主要的困难是如何排除(滤除)切屑变形、卷屑产生的热电动势噪声信号。
3)红外线法:采用红外探测系统探测由刀刃发出的红外辐射线,其信号代表切削区的平均温度。红外线法的响应速度和灵敏度均高于上述两种方法。但实际切削时切削液和切屑的影响常是红外线探测法遇到的困难。
研究证明,切削温度的监视是一种重要的过程监视技术。
(2)监视系统 图14是一种车床热电动势监视探测系统。它由绝缘四爪、主轴、刀具和工件组成热电偶电路,输入信号经放大器5进入测量电路6,再送入快速傅里叶变换(FFT)分析器7。当切削过程出现颤震时,功率谱密度曲线及其峰值将变化。利用这一特性可以监视切削过程的异常振动。

综上所述,在刀具过程监视中,工业界和科技界比较一致的看法是:AE法可以高精度、可靠地实现刀具破/折损实时监视与控制,而长期研究开发的刀具磨损过程监视方法和系统还不能高精度可靠地实现。从80年代末以来,兴起了多传感器融合识别刀具实时磨损监视的研究。这项研究利用声发射、温度和振动或别的传感组合进行融合识别磨损,其实验结果达到高的报警成功率97%~99%。但实现商品化还有一段距离。


 鹏翔新闻
鹏翔新闻


{kind=link}