μ s 个 个 μ s dB kHz 个
480 1 729 10 371 18 975 77 90 67
480 1 725 10 411 18 575 77 90 66
481 1 726 10 440 17 985 77 89 67
480 1 723 10 378 18 866 76 90 67
480 1 729 10 459 18 557 77 90 67
表 4 激励探头距波导杆 220 mm 且不跨焊缝时的声发射信号特征参数
上升时间 计数 相对能量 持续时间 幅值 频率 到峰计数
μ s 个 个 μ s dB kHz 个
407 1 806 10 757 18 742 77 96 50
407 1 805 10 760 18 765 77 98 51
405 1 799 10 751 18 740 77 98 50
407 1 810 10 788 18 776 78 99 53
407 1 805 10 785 18 763 77 97 51
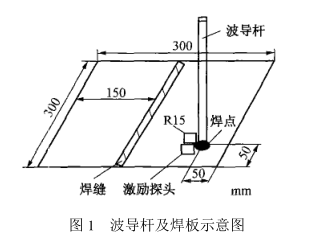
R15 探头耦合在波导杆上不动 , 而把激励探头耦合至距波导杆 220 mm 的位置 ( 跨焊缝) ,待稳定后 , 每隔 3 min 抽取一个 HIT 的一组声发射信号特征参数 , 共测五组见表 5 。
表 5 激励探头距波导杆 220 mm 且跨焊缝时的声发射信号特征参数
上升时间 计数 相对能量 持续时间 幅值 频率 到峰计数
μ s 个 个 μ s dB kHz 个
665 1 802 10 279 17 575 75 102 105
664 1 807 10 295 17 582 75 102 105
665 1 807 10 285 17 569 76 101 106
665 1 809 10 275 17 590 70 102 107
665 1 802 10 280 17 559 75 102 106
2. 3 试验结果分析声发射信号经过波导杆后 , 其特征参数发生了相应变化 , 对比表 2 和表 3 可知 , 所选定的七个参数中除频率变小外 , 其余参数的值均有所变大 , 其中参数平均变化率为 , 上升时间 + 21 %; 计数 + 3 %; 相对能量 + 17 %; 持续时间 + 17 %; 幅值 + 2. 7 %; 频率- 16 %; 到峰计数 + 6 % 。可见 , 从参数幅值来看 , 此类波导杆对声发射信号不但没有衰减反而有微量的增益作用。从表 3 ~ 5 可知 , 在声发射源距离波导杆220 mm 时 , 不跨越焊缝声发射信号特征参数无明显变化 ; 而跨越焊缝时 , 声发射信号经过焊缝后信号特征参数有一定变化 , 这说明在使用波导杆后 , 焊缝对声发射信号特征参数的影响仍然存在。
2. 4 波导杆中声发射信号传播速度的测定激励探头耦合在钢板上 , 把一个 R15 探头耦合在波导杆与钢板上的焊接处 , 另一个 R15 探头耦合在波导杆顶部 , 待稳定后 , 每隔 3 min 测量一个 HIT的一组声发射信号的接收时间 , 共测三组数值分别为 0. 176 6 ,0. 176 8 和 0. 176 8 ms 。声速的计算公式为 V = S/ Δ t , 式中传播距离S = 800 mm , Δ t 为时间差 , 算出的三个 HIT 的声速分别为 4 530 ,4 525 和 4 525 m/ s 。可见 , 波导杆中的声速为 4 525 ~ 4 530 m/ s 。
3 结论
(1) 使用波导杆后 , 声发射信号的特征参数将有所改变 , 但计数和幅值两个参数的值变化很小。
(2) 使用波导杆后 , 焊缝对声发射信号的特征参数影响仍然存在 , 但对计数和幅值两个参数值的影响不大。
(3) 波导杆对声发射信号幅值有微量增益作用。
(4) 实际检测时 , 建议重点关注计数和幅值两个特征参数值的变化。
( 5) 使用波导杆后 , 由于波导杆中的声速与被检设备中 ( 即钢板 ) 的声速不同 , 在声发射检测时 , 只能使用一个声速对声发射源的传播距离进行计算。当使用被检设备中的声速时 , 用于声发射源定位计算的声速较声发射信号在波导杆中的实际声速要小 , 故影响声发射源的定位位置 ; 当使用波导杆中的声速时 , 则用于声发射源定位计算的声速较声发射信号在被检设备中的实际声速要大 , 故也影响声发射源的定位位置。因此 , 当使用波导杆后 , 无论使用哪个声速对声发射源定位进行计算 , 声发射源的定位精度都将受到影响。
作者:蒋仕良


 鹏翔新闻
鹏翔新闻


{kind=link}